Computer Science Department
Stanford University
Gates Computer Science Bldg., Room 310
Stanford, CA 94305-9020
fedkiw@cs.stanford.edu
|

|
CS205L: Continuous Mathematical Methods with an Emphasis on Machine Learning
A survey of numerical approaches to the continuous mathematics used throughout computer science with an emphasis on machine and deep learning.
Although motivated from the standpoint of machine learning, the course will focus on the underlying mathematical methods including computational linear algebra and optimization, as well as special topics such as automatic differentiation via backward propagation, momentum methods from ordinary differential equations, CNNs, RNNs, etc.
Written homework assignments and (straightforward) quizzes focus on various concepts.
Slide deck. If you find this useful, please cite BibTeX.
Brief Bio
Fedkiw (the Canon Professor in the School of Engineering) received his Ph.D. in Mathematics from UCLA and spent part of his postdoctoral studies at Caltech in Aeronautics before joining the Stanford Computer Science Department.
He was awarded an Academy Award from the Academy of Motion Picture Arts and Sciences (twice: 2008 and 2015), the National Academy of Science Award for Initiatives in Research,
a Packard Foundation Fellowship, a Presidential Early Career Award for Scientists and Engineers (PECASE), a Sloan Research Fellowship,
the ACM Siggraph Significant New Researcher Award,
an Office of Naval Research Young Investigator Program Award (ONR YIP), the Okawa Foundation Research Grant, the Robert Bosch Faculty Scholarship, the Robert N. Noyce Family Faculty Scholarship, four distinguished teaching awards including the Tau Beta Pi Teaching Excellence Award (for 2020-21), etc.
He has published over 150 research papers in computational physics, graphics, learning, and vision, a book on level set methods, and is currently working at the interface between physical simulation and machine learning - having joined the Stanford Artificial Intelligence Laboratory (SAIL) in 2017.
He was a consultant with Industrial Light + Magic for over 19 years, receiving screen credits on movies such as "Terminator 3: Rise of the Machines", "Star Wars: Episode III - Revenge of the Sith", "Poseidon", "Evan Almighty", "Kong: Skull Island", etc.
Currently, he is a consultant at Epic Games (for 6+ years).
He has graduated 42 Ph.D. students so far, and is very proud of their various amazing accomplishments!
Publications
KEYWORDS (for some newer ideas): NEURAL NETWORKS, OPTIMIZATION, DATA DRIVEN
Faces - Simulation/Vision/Learning...
- OPTIMIZATION Zhu, Y., Omens, D., He, H., and Fedkiw, R., "Democratizing the Creation of Animatable Facial Avatars", arXiv:2401.16534 (January 2024).
- DATA DRIVEN Lin, W., Zhu, Y., Guo, D., and Fedkiw, R.,
"Leveraging Deepfakes to Close the Domain Gap between Real and Synthetic Images in Facial Capture Pipelines", arXiv:2204.10746 (April 2022).
- DATA DRIVEN Cong, M., Lan, L., and Fedkiw, R.,
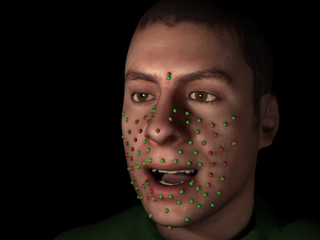
"Local Geometric Indexing of High Resolution Data for Facial Reconstruction from Sparse Markers", arXiv:1903.00119 (March 2019) and IEEE TVCG (2023).
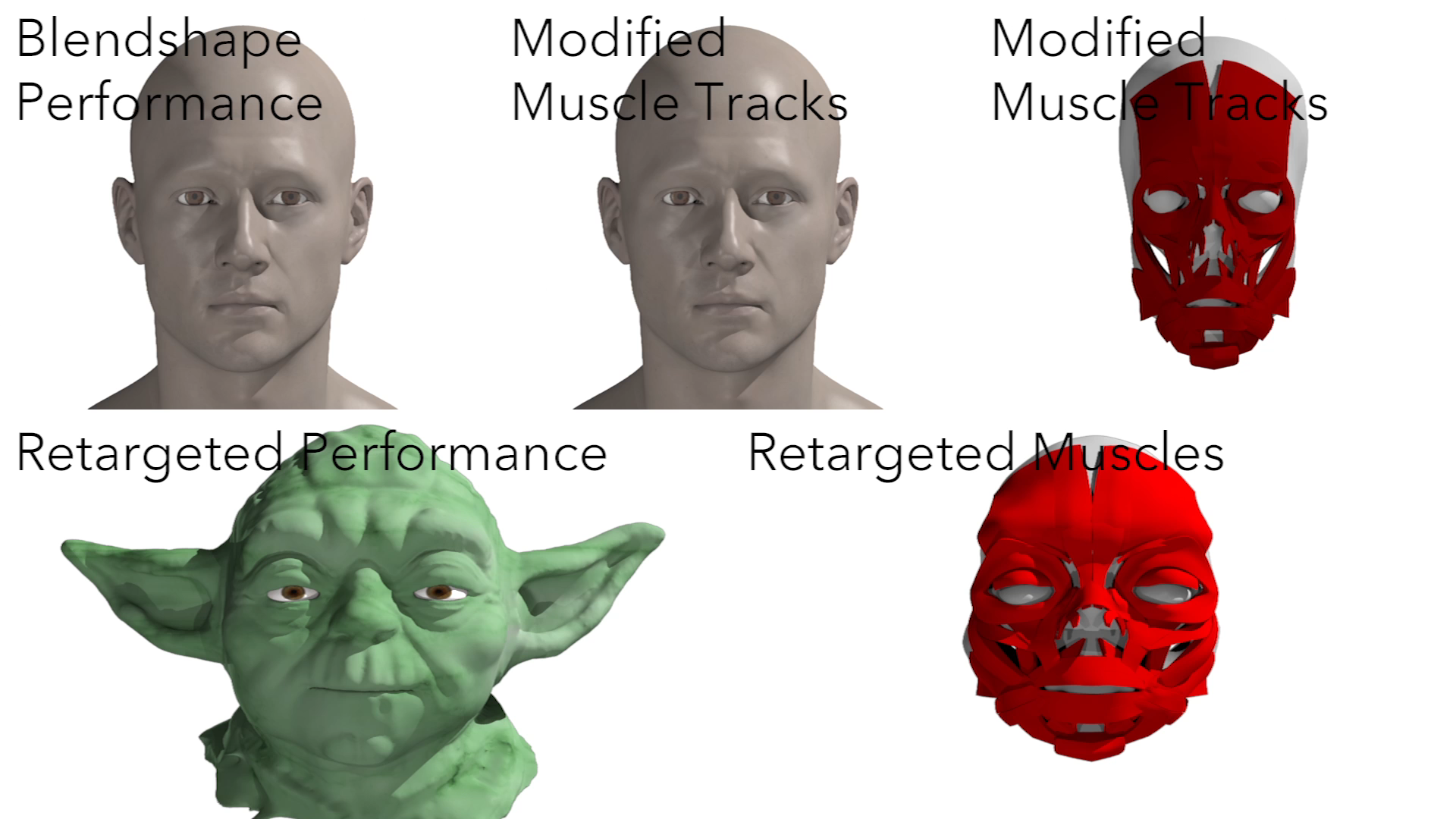
- OPTIMIZATION Bao, M., Cong, M., Grabli, S., and Fedkiw, R.,
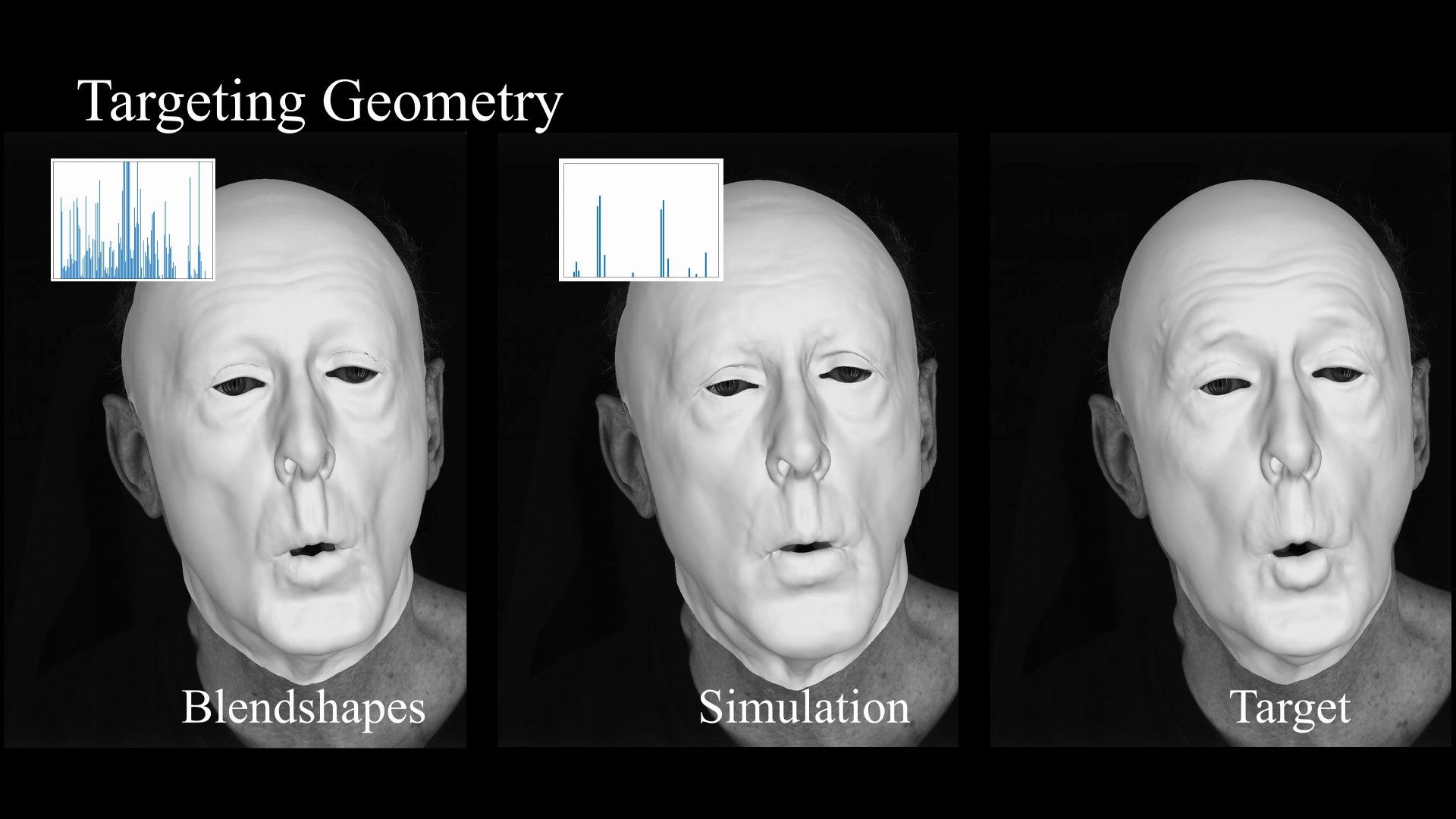
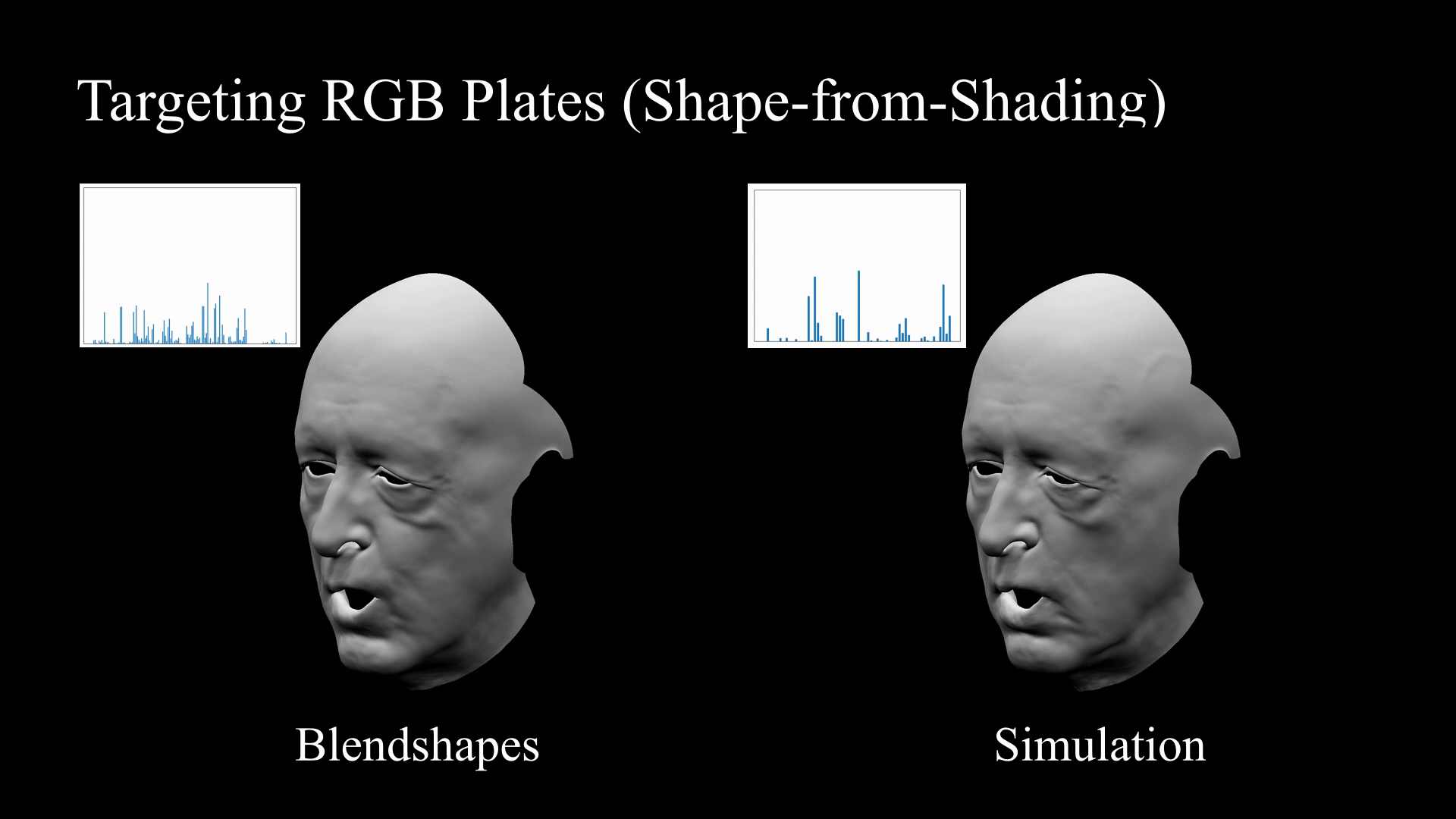
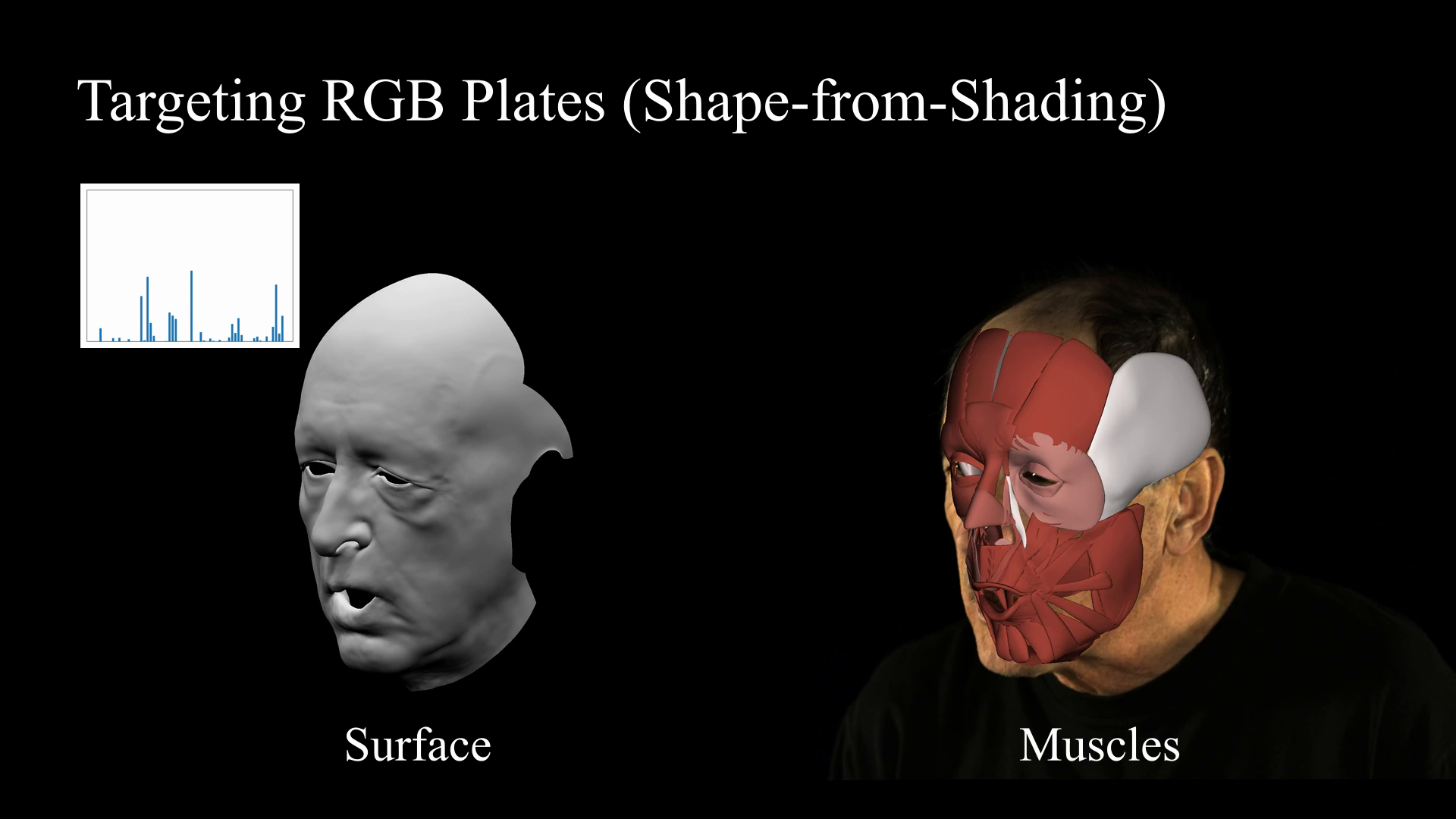
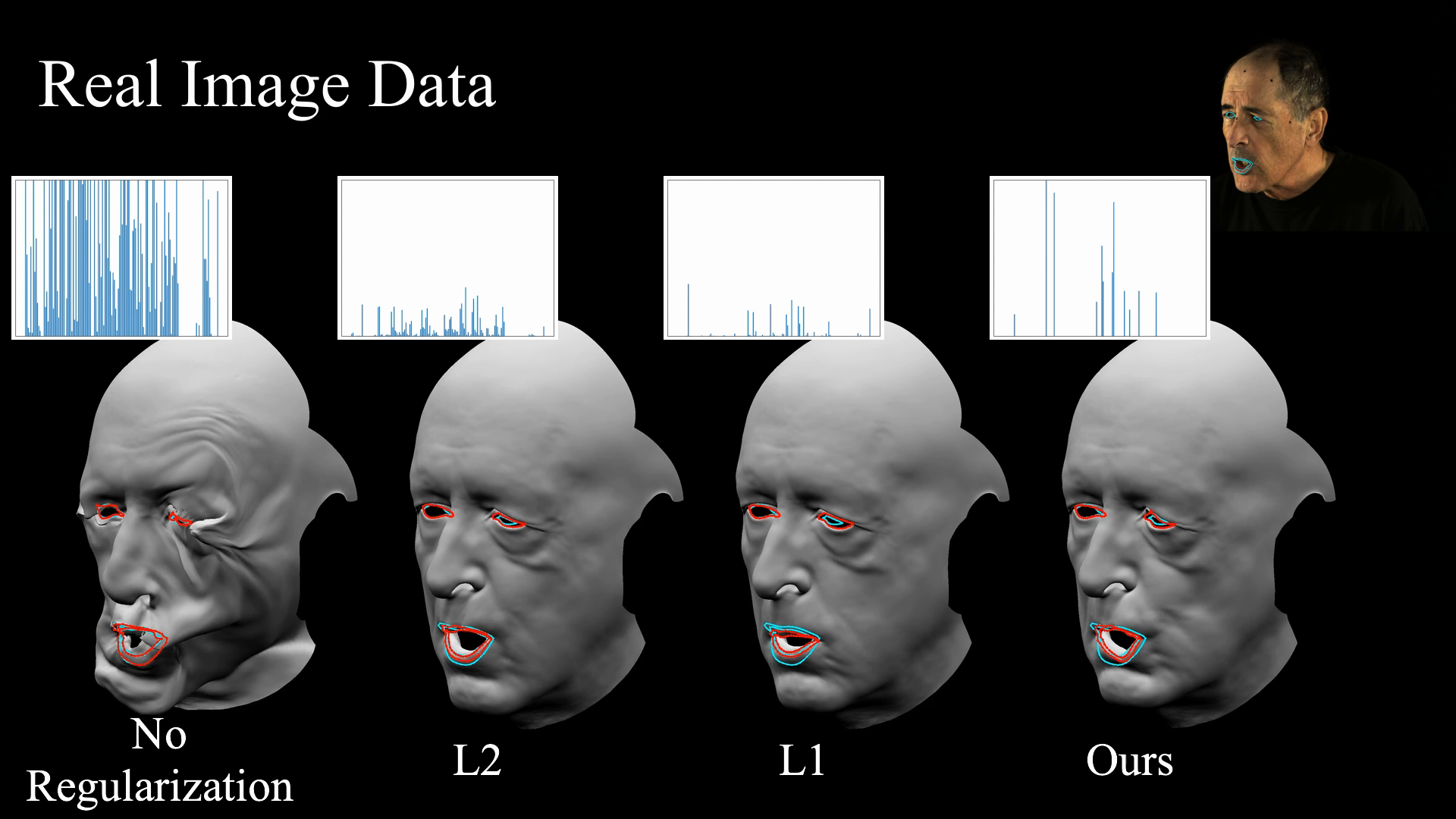
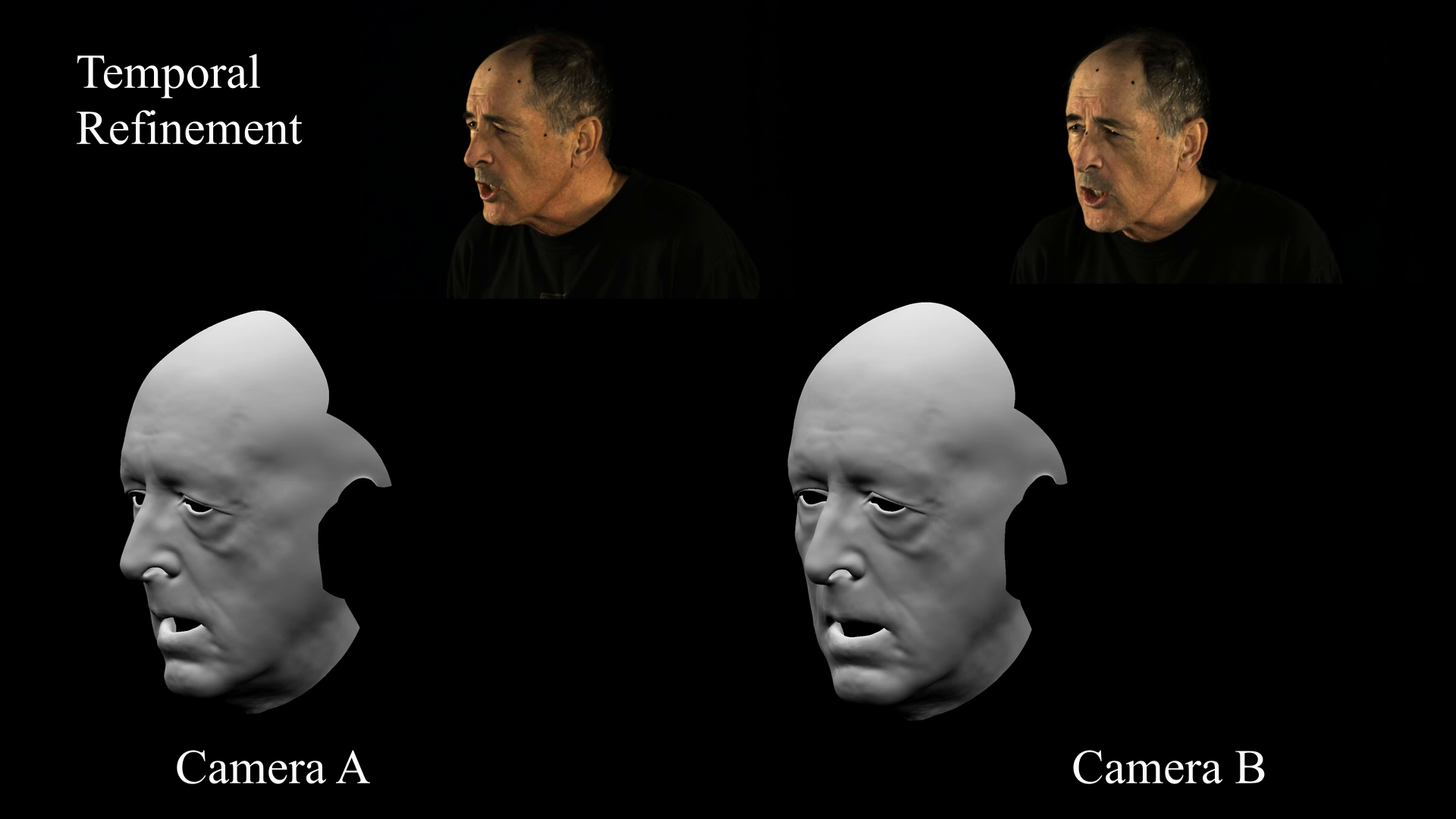
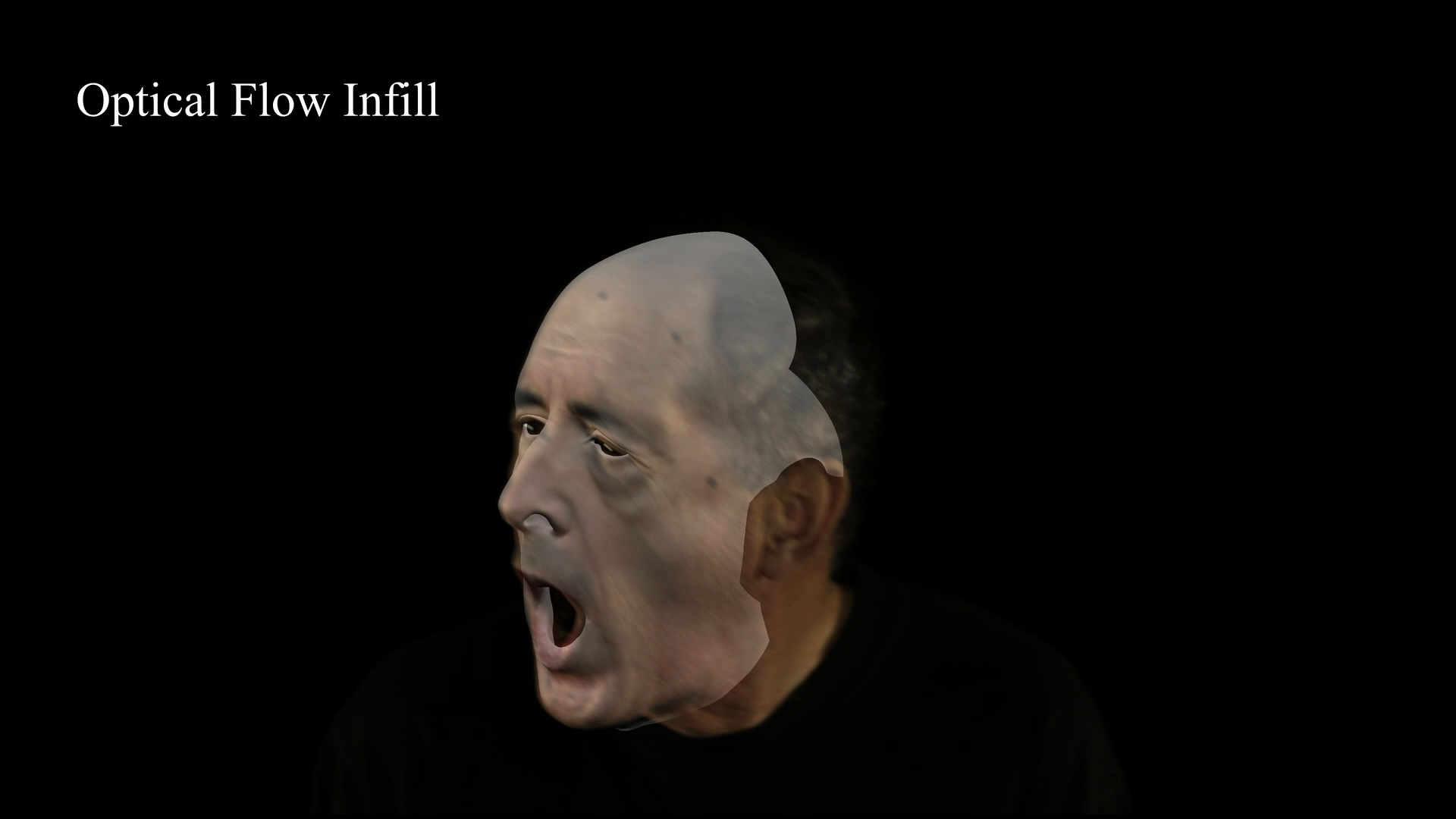
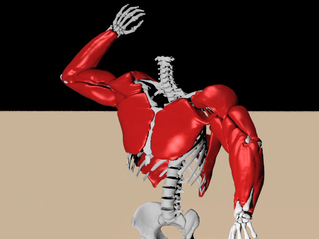
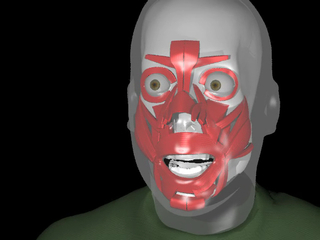
"High-Quality Face Capture Using Anatomical Muscles", The IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2019.
- OPTIMIZATION Bao, M., Hua, X., and Fedkiw, R.,
"Improved Search Strategies for Determining Facial Expression", arXiv:1812.02897 (December 2018).
- OPTIMIZATION Bao, M., Wu, J., Yao, X., and Fedkiw, R.,
"Deep Energies for Estimating Three-Dimensional Facial Pose and Expression", arXiv:1812.02899 (December 2018). and Communications on Applied Mathematics and Computation, edited by A. Bertozzi, R. Fedkiw, F. Gibou, C.-Y. Kao, C.-W. Shu, R. Tsai, and W. Yin (March 2023).
- DATA DRIVEN Cong, M., Bhat, K. S., and Fedkiw, R.,
"Art-Directed Muscle Simulation for High-End Facial Animation",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by Ladislav Kavan and Chris Wojtan, pp. 119-127 (2016).
- DATA DRIVEN Cong, M., Bao, M., E, J. L., Bhat, K. S., and Fedkiw, R.,
"Fully Automatic Generation of Anatomical Face Simulation Models",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by F. Bertails-Descoubes and S. Coros, pp. 175-183 (2015).
- Sifakis, E., Selle, A., Robinson-Mosher, A. and Fedkiw, R.,
"Simulating Speech with a Physics-Based Facial Muscle Model",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by M.-P. Cani and J. O.Brien, pp. 261-270, 2006.
- Sifakis, E. and Fedkiw, R.,
"Facial Muscle Activations from Motion Capture",
Video Proceedings of the 2005 Computer Vision and Pattern Recognition Conference (CVPR), 2005.
- Sifakis, E., Neverov, I. and Fedkiw, R.,
"Automatic Determination of Facial Muscle Activations from Sparse Motion Capture Marker Data",
SIGGRAPH 2005, ACM TOG 24, 417-425 (2005).
Cloth - Simulation/Vision/Learning...
- NEURAL NETWORKS
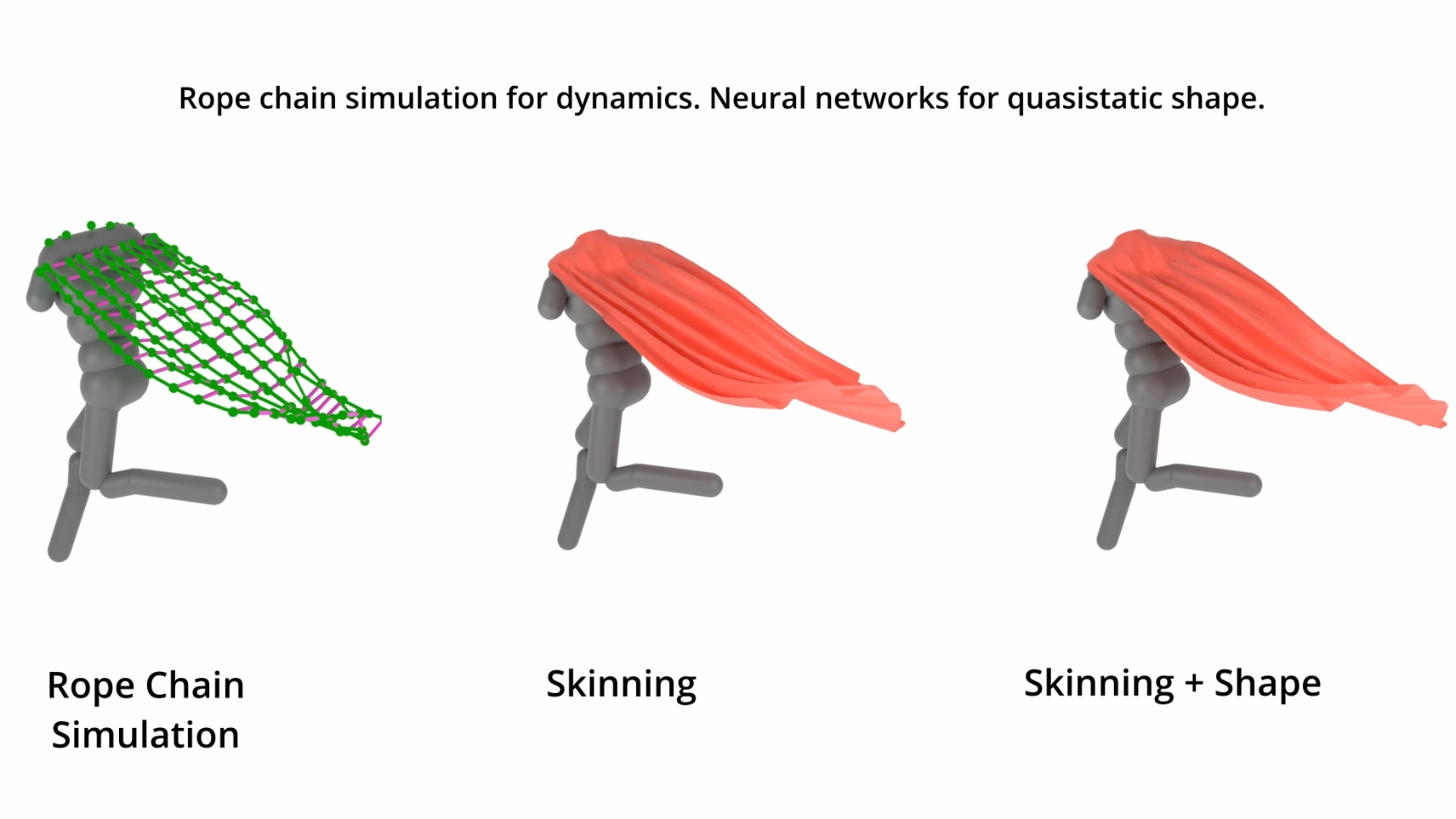
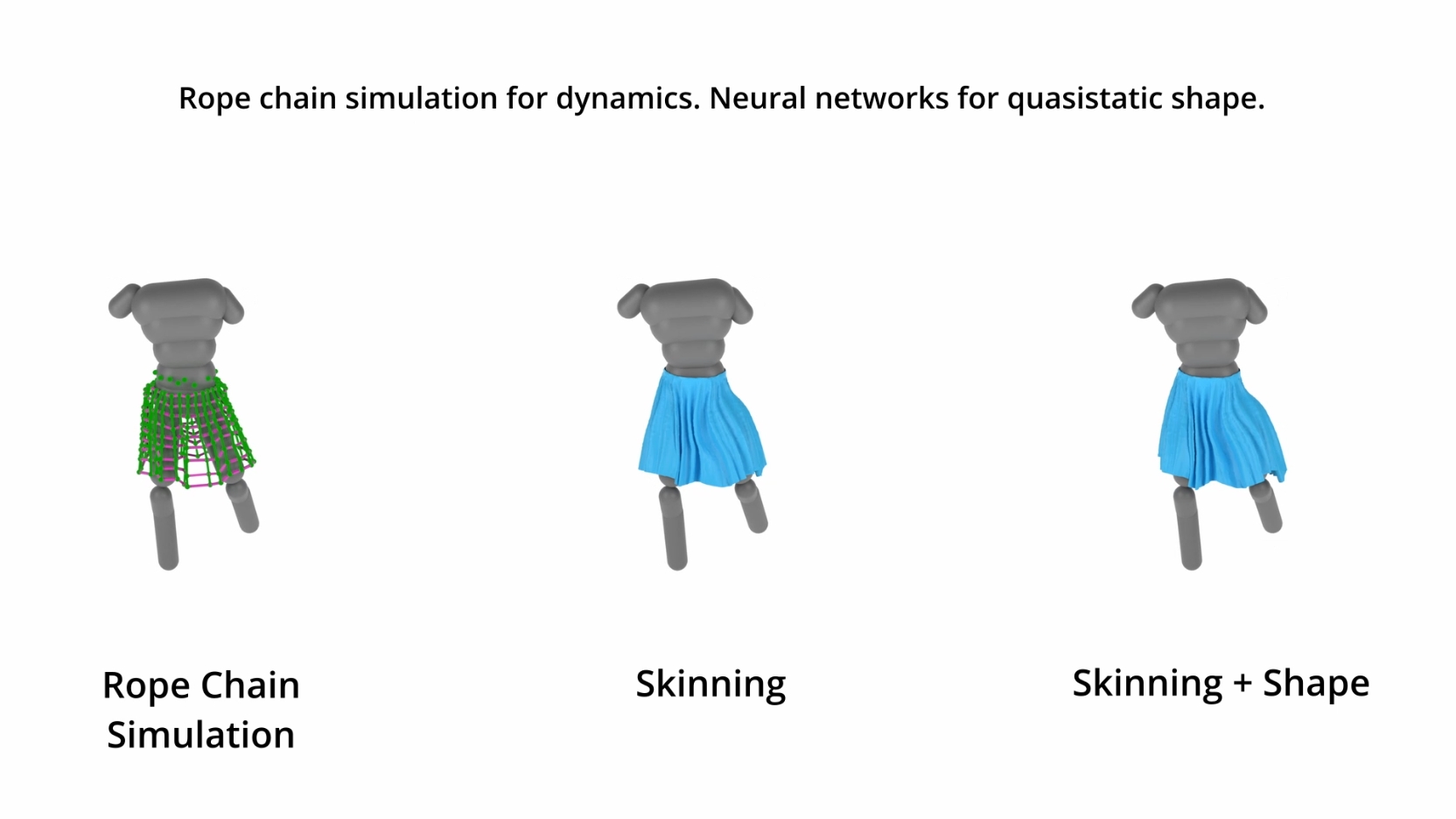
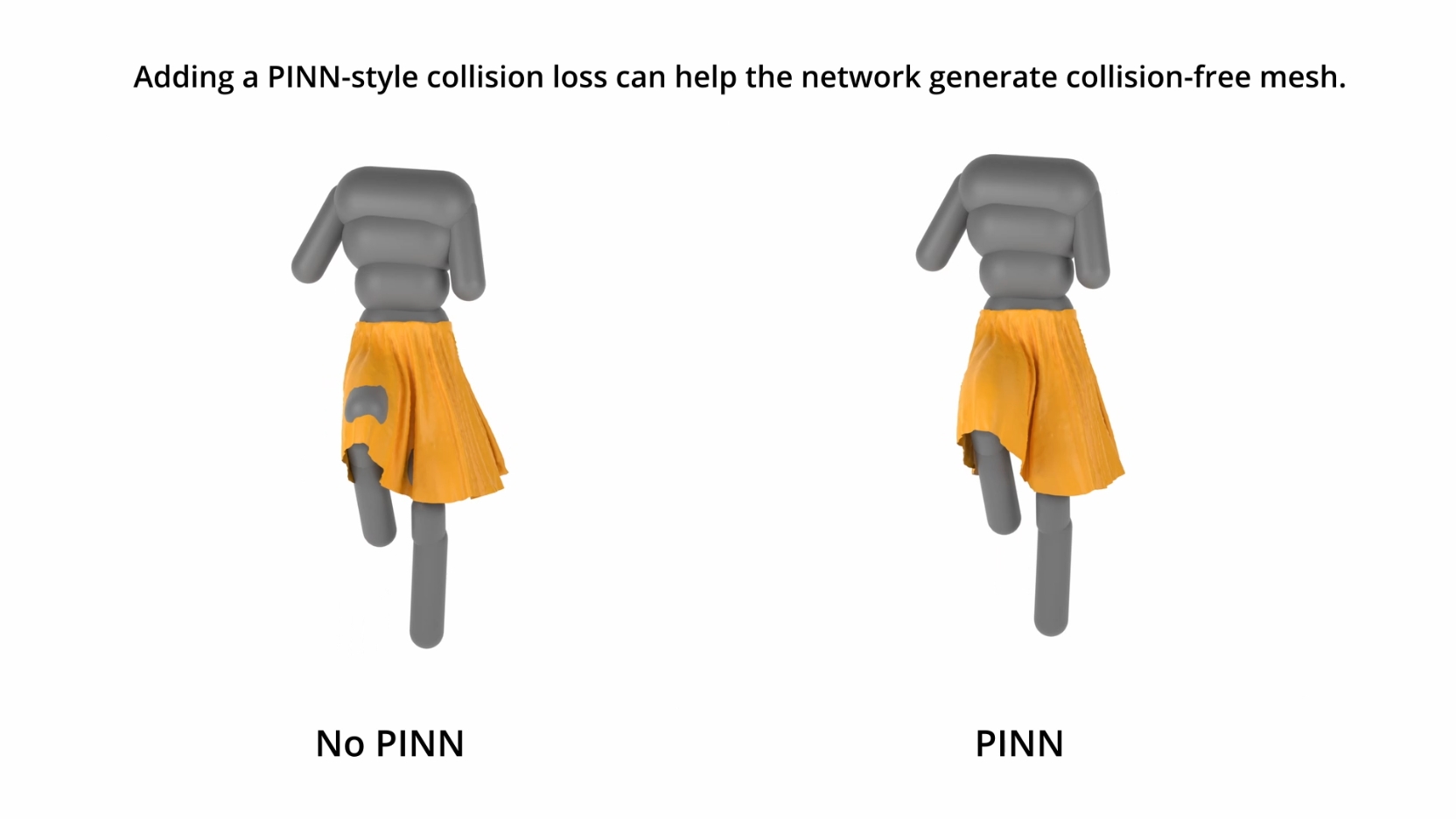
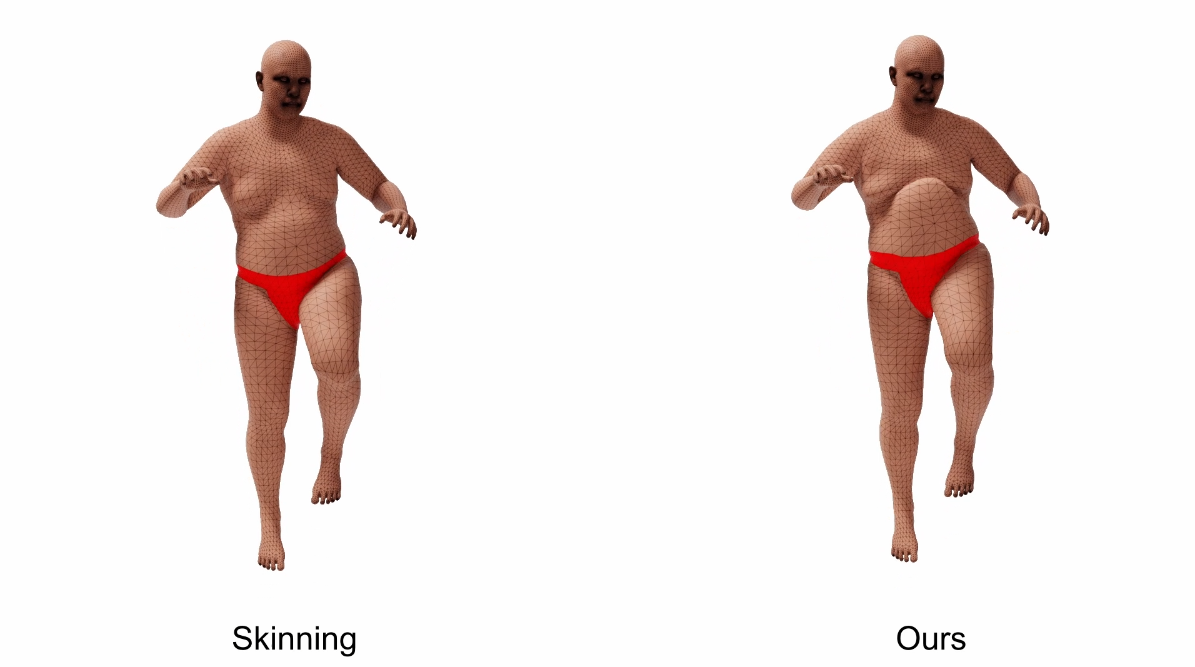
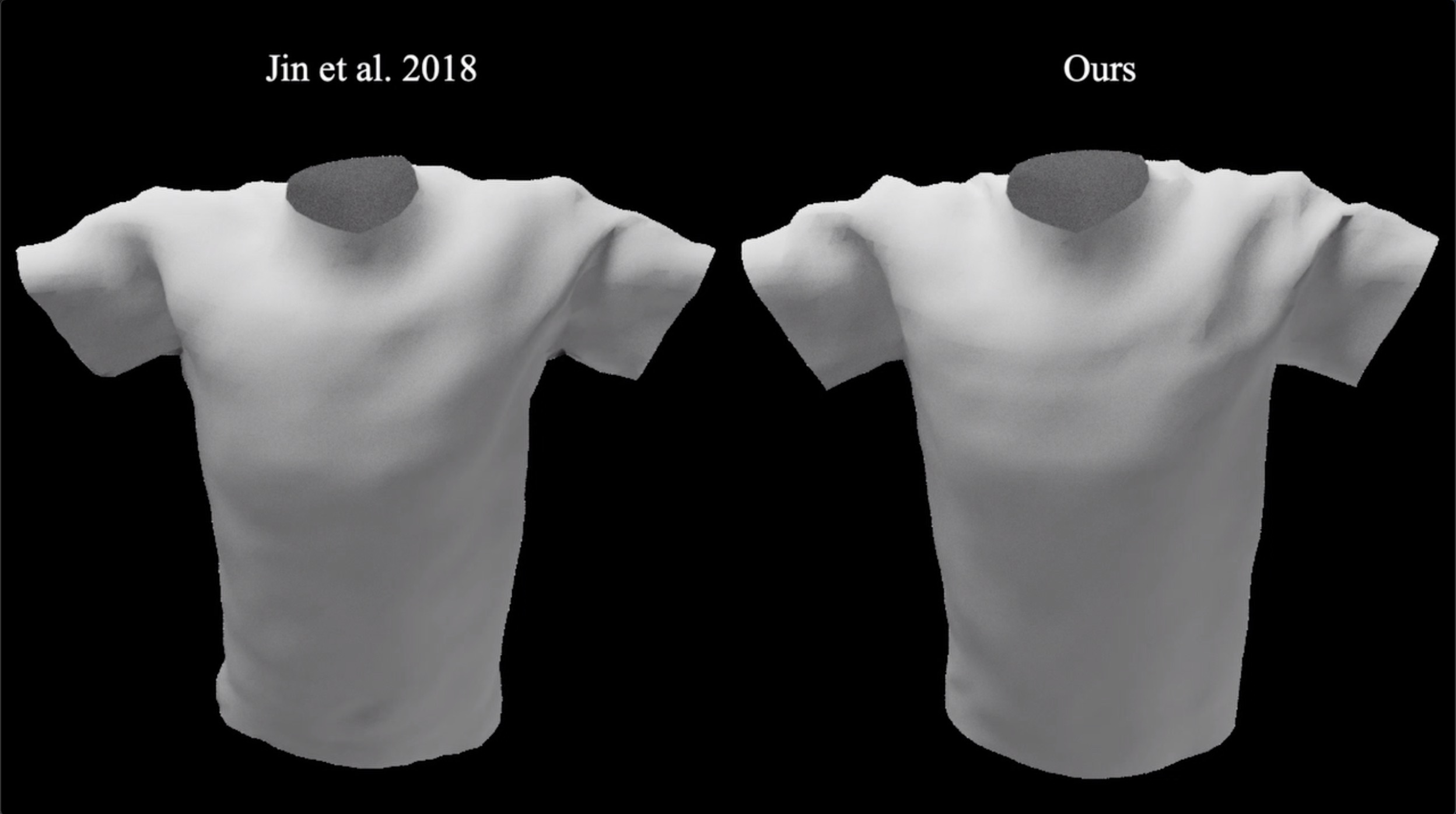
Jin, Y., Omens, D., Geng, Z., Teran, J., Kumar, A., Tashiro, K., and Fedkiw, R., "A Neural-Network-Based Approach for Loose-Fitting Clothing", arXiv:2404.16896 (April 2024).
- NEURAL NETWORKS
Wu, J., Thomas, D., and Fedkiw, R., "Weakly-Supervised 3D Reconstruction of Clothed Humans via Normal Maps", arXiv:2311.16042 (November 2023). and "Sparse-View 3D Reconstruction of Clothed Humans via Normal Maps", IEEE Computer Society/Computer Vision Foundation Winter Conference on Applications of Computer Vision (WACV), 2025.
- NEURAL NETWORKS
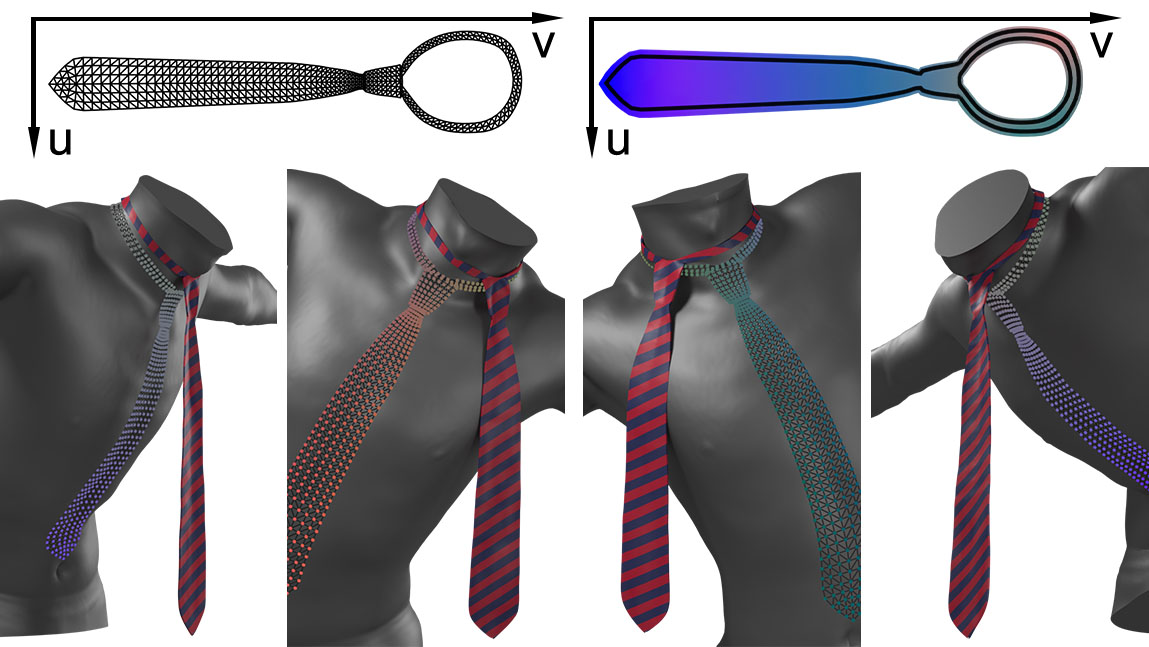
Wu, J., Geng, Z., Zhou, H., and Fedkiw, R., "Skinning a Parameterization of Three-Dimensional Space for Neural Network Cloth", arXiv:2006.04874 (June 2020).
- NEURAL NETWORKS
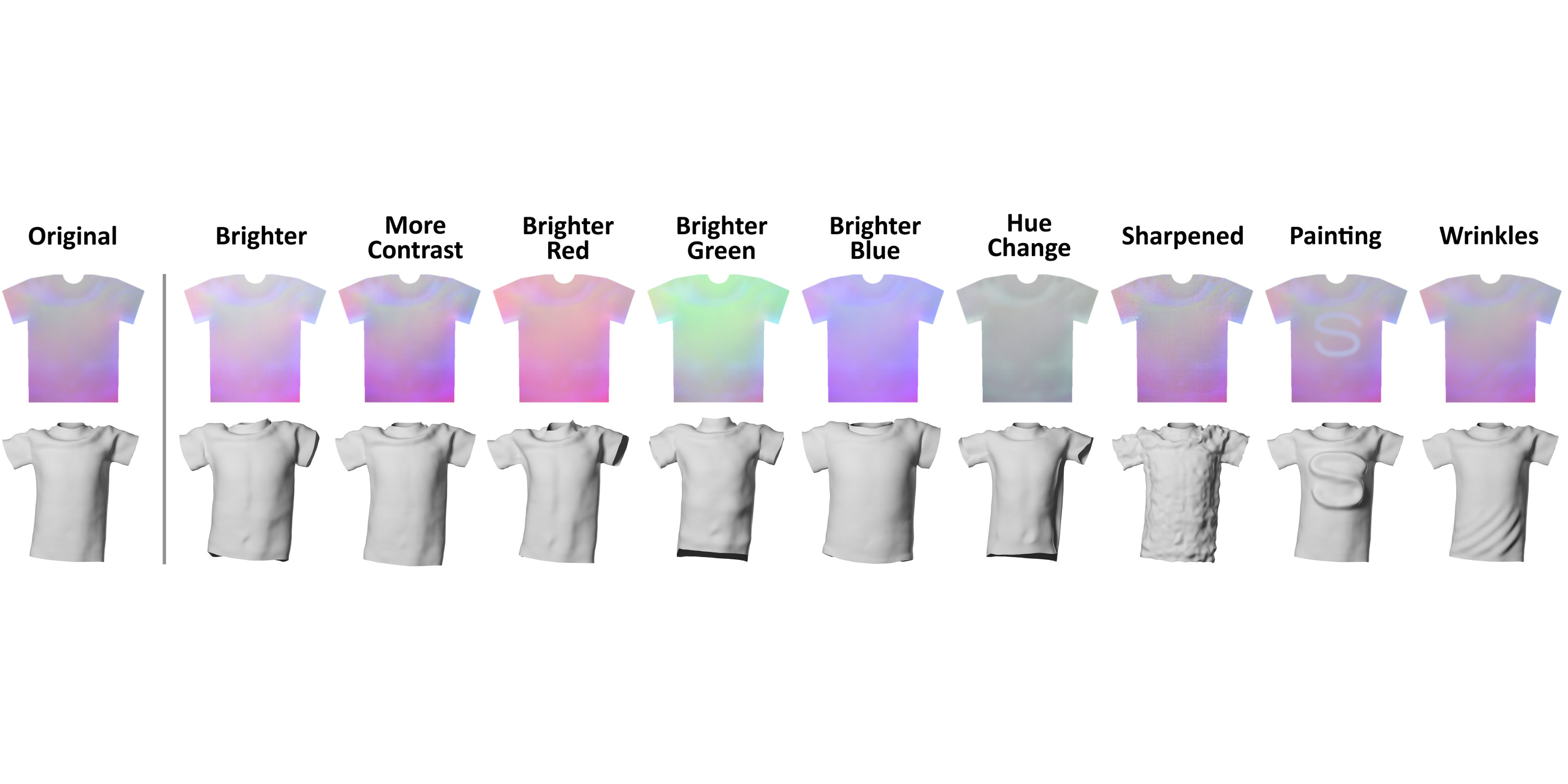
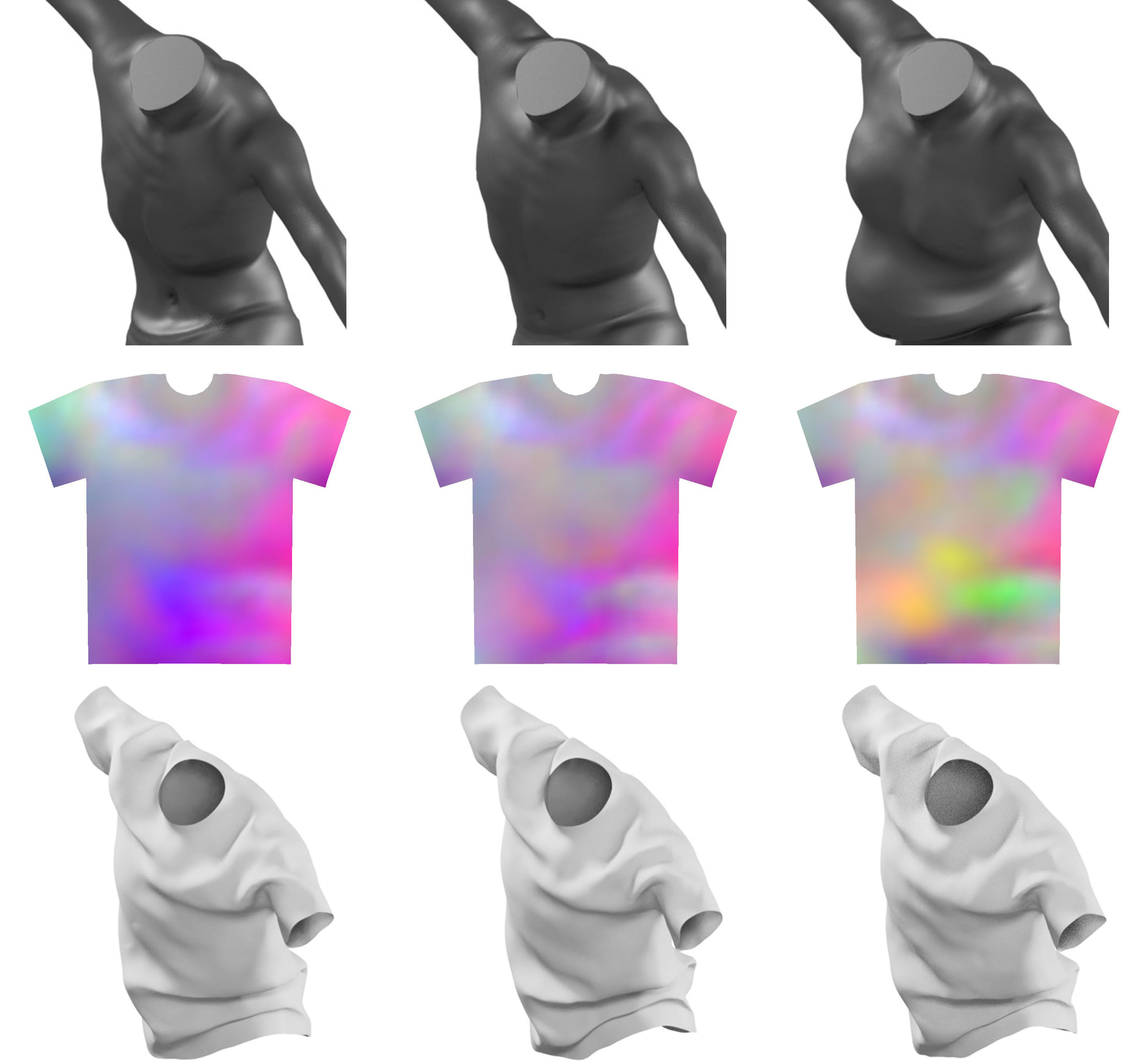
Wu, J., Jin, Y., Geng, Z., Zhou, H., and Fedkiw, R., "Recovering Geometric Information with Learned Texture Perturbations", arXiv:2001.07253 (January 2020). and
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by M. Neff and R. Narain (September 2021).
- NEURAL NETWORKS
Geng, Z., Johnson, D. and Fedkiw, R., "Coercing Machine Learning to Output Physically Accurate Results", J.Comp.Phys. 406, 109099 (2020).
- NEURAL NETWORKS Jin, N., Zhu, Y., Geng, Z., and Fedkiw, R.,
"A Pixel-Based Framework for Data-Driven Clothing", arXiv:1812.01677 (December 2018). and
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by J. Bender and T. Popa (September 2020).
- Jin, N., Lu, W., Geng, Z., and Fedkiw, R.,
"Inequality Cloth",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by Stephen N. Spencer, Article No. 16 (2017).
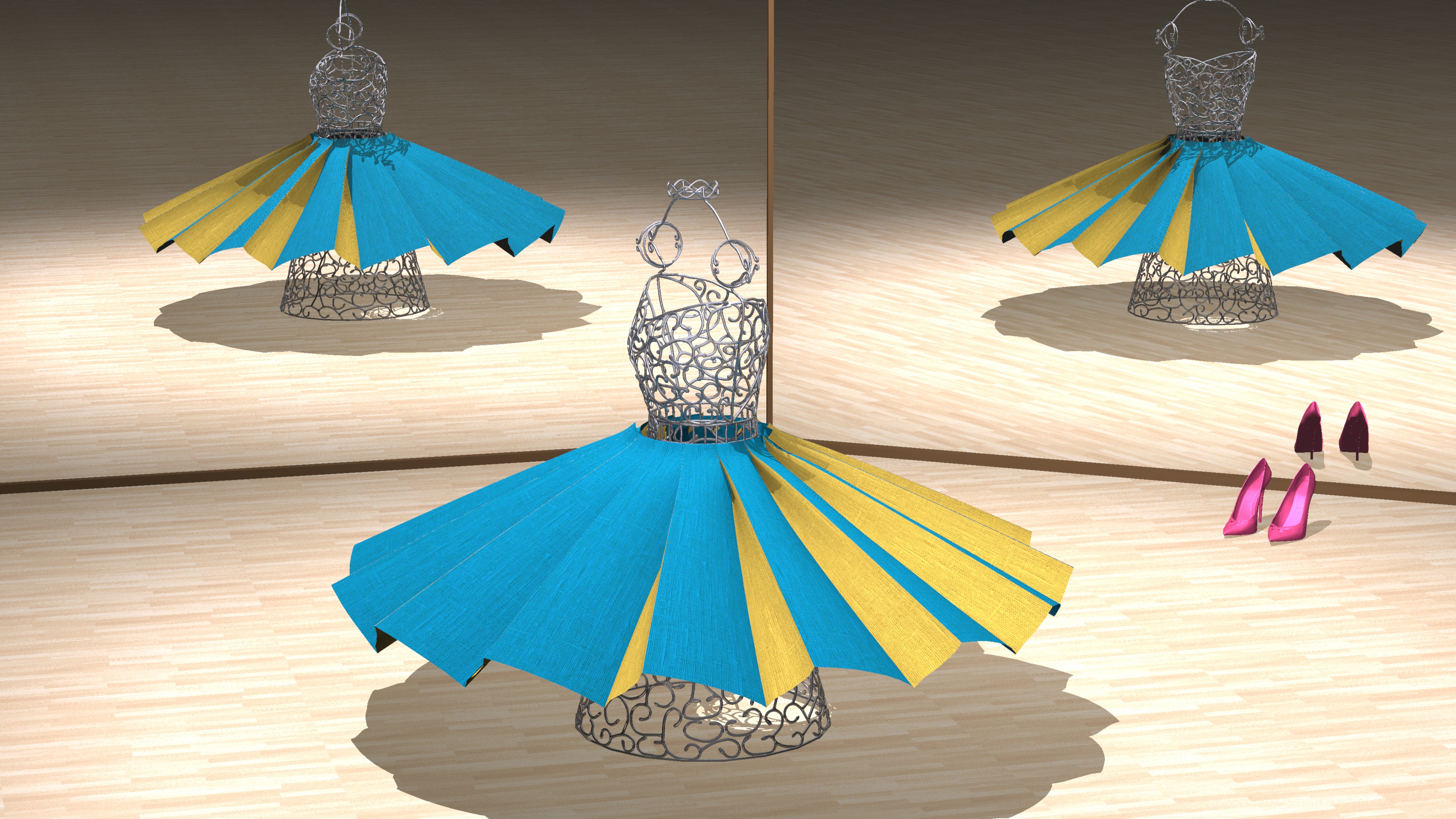
- Patkar, S., Jin, N., and Fedkiw, R.,
"A New Sharp-Crease Bending Element for Folding and Wrinkling Surfaces and Volumes",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by F. Bertails-Descoubes and S. Coros, pp. 7-15 (2015).
- Selle. A, Su, J., Irving, G. and Fedkiw, R.,
"Robust High-Resolution Cloth Using Parallelism, History-Based Collisions, and Accurate Friction,"
IEEE TVCG 15, 339-350 (2009).
- Bridson, R., Marino, S. and Fedkiw, R.,
"Simulation of Clothing with Folds and Wrinkles",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by D. Breen and M. Lin, pp. 28-36, 2003.
- Bridson, R., Fedkiw, R. and Anderson, J.,
"Robust Treatment of Collisions, Contact and Friction for Cloth Animation",
SIGGRAPH 2002, ACM TOG 21, 594-603 (2002).
Trees - Simulation/Vision/Learning...
- NEURAL NETWORKS Quigley, E., Lin, W., Zhu, Y., and Fedkiw, R.,
"Three Dimensional Reconstruction of Botanical Trees with Simulatable Geometry", arXiv:1812.08849 (December 2018). and
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by M. Neff and R. Narain (September 2021).
- Quigley, E., Yu, Y., Huang, J., Lin, W., and Fedkiw, R.,
"Real-time Interactive Tree Animation",
IEEE TVCG 22 (2017).
Computer Vision...
- Gibou, F. and Fedkiw, R.,
"A Fast Hybrid k-Means Level Set Algorithm for Segmentation",
4th Annual Hawaii International Conference on Statistics and Mathematics, pp. 281-291, 2005.
Stanford Technical Report, November 2002.
- Zhao, H.-K., Osher, S. and Fedkiw, R.,
"Fast Surface Reconstruction using the Level Set Method",
1st IEEE Workshop on Variational and Level Set Methods, in conjunction with the 8th International Conference on Computer Vision (ICCV), Vancouver, Canada, 194-202 (2001).
Muscle Simulation & Finite Elements...
- Irving, G., Schroeder, C. and Fedkiw, R., "Volume Conserving Finite Element Simulation of Deformable Models", SIGGRAPH 2007, ACM TOG 26, 13.1-13.6 (2007).
- Weinstein, R., Guendelman, E. and Fedkiw, R.,
"Impulse-Based Control of Joints and Muscles",
IEEE TVCG 14, 37-46 (2008).
- Weinstein, R., Guendelman, E. and Fedkiw, R.,
"Impulse-Based PD Control for Joints and Muscles",
SIGGRAPH 2006 Sketches and Applications, 2006.
- Blemker, S., Teran, J., Sifakis, E., Fedkiw, R. and Delp, S.,
"Fast 3D Muscle Simulations using a New Quasistatic Invertible Finite-Element Algorithm",
10th International Symposium on Computer Simulation in Biomechanics, Cleveland, OH, July 2005.
- Teran, J., Sifakis, E., Irving, G. and Fedkiw, R.,
"Robust Quasistatic Finite Elements and Flesh Simulation",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by K. Anjyo and P. Faloutsos, pp. 181-190, 2005.
- Irving, G., Teran, J. and Fedkiw, R.,
"Tetrahedral and Hexahedral Invertible Finite Elements",
Graphical Models 68, 66-89 (2006).
- Teran, J., Sifakis, E., Blemker, S., Ng Thow Hing, V., Lau, C. and Fedkiw, R.,
"Creating and Simulating Skeletal Muscle from the Visible Human Data Set",
IEEE TVCG 11, 317-328 (2005).
- Irving, G., Teran, J. and Fedkiw, R.,
"Invertible Finite Elements for Robust Simulation of Large Deformation",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by R. Boulic and D. Pai, pp. 131-140, 2004.
- Teran, J., Blemker, S., Ng Thow Hing, V. and Fedkiw, R.,
"Finite Volume Methods for the Simulation of Skeletal Muscle",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by D. Breen and M. Lin, pp. 68-74, 2003.
Fracture...
- Sifakis, E., Der, K. and Fedkiw, R.,
"Arbitrary Cutting of Deformable Tetrahedralized Objects",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by D. Metaxas and J. Popovic, pp. 73-80 (2007).
- Molino, N., Bao, Z. and Fedkiw, R.,
"A Virtual Node Algorithm for Changing Mesh Topology During Simulation",
SIGGRAPH 2004, ACM TOG 23, 385-392 (2004).
Deformable Bodies & Reduced Deformable Bodies...
- Chen, Y., Han, Y., Chen, J., Ma, S., Fedkiw, R., and Teran, J., "Primal Residual Reduction with Extended Position Based Dynamics and Hyperelasticity", Computers and Graphics 119, #103902 (2024).
- Chen, Y., Han, Y., Chen, J., Ma, S., Fedkiw, R., and Teran, J., "Primal Extended Position Based Dynamics for Hyperelasticity", Proc. of the 16th ACM Siggraph Conference on Motion, Interaction, and Games (MIG), November 2023.
- Gagniere, S., Han, Y., Chen, Y., Hyde, D., Marquez-Razon, A., Teran, J., and Fedkiw, R., "A Robust Grid-Based Meshing Algorithm for Embedding Self-Intersecting Surfaces", Computer Graphics Forum, vol 43, issue 1 (2024).
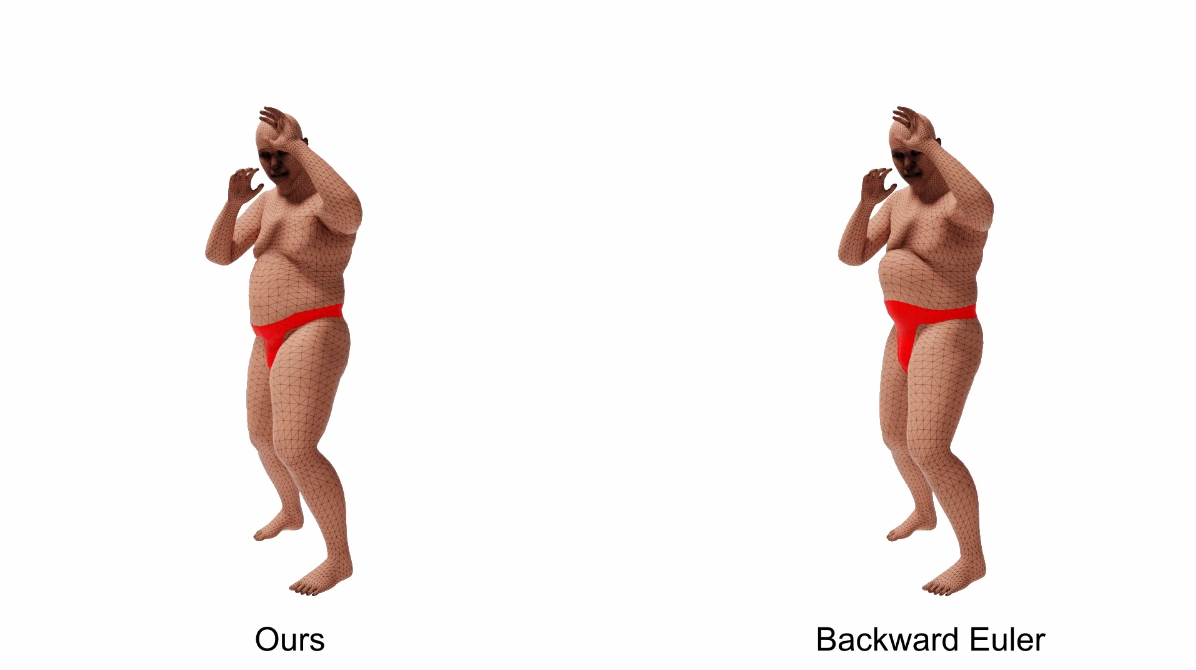
- NEURAL NETWORKS, OPTIMIZATION Jin, Y., Han, Y., Geng, Z., Teran, J. and Fedkiw, R., "Analytically Integratable Zero-restlength Springs for Capturing Dynamic Modes unrepresented by Quasistatic Neural Networks", ACM SIGGRAPH 2022 Conference Proceedings.
- Lu, W., Jin, N., and Fedkiw, R.,
"Two-way Coupling of Fluids to Reduced Deformable Bodies",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by Ladislav Kavan and Chris Wojtan, pp. 67-76 (2016).
- Sheth, R., Lu, W., Yu, Y., and Fedkiw, R.,
"Fully Momentum-Conserving Reduced Deformable Bodies with Collision, Contact, Articulation, and Skinning",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by F. Bertails-Descoubes and S. Coros, pp. 45-54 (2015).
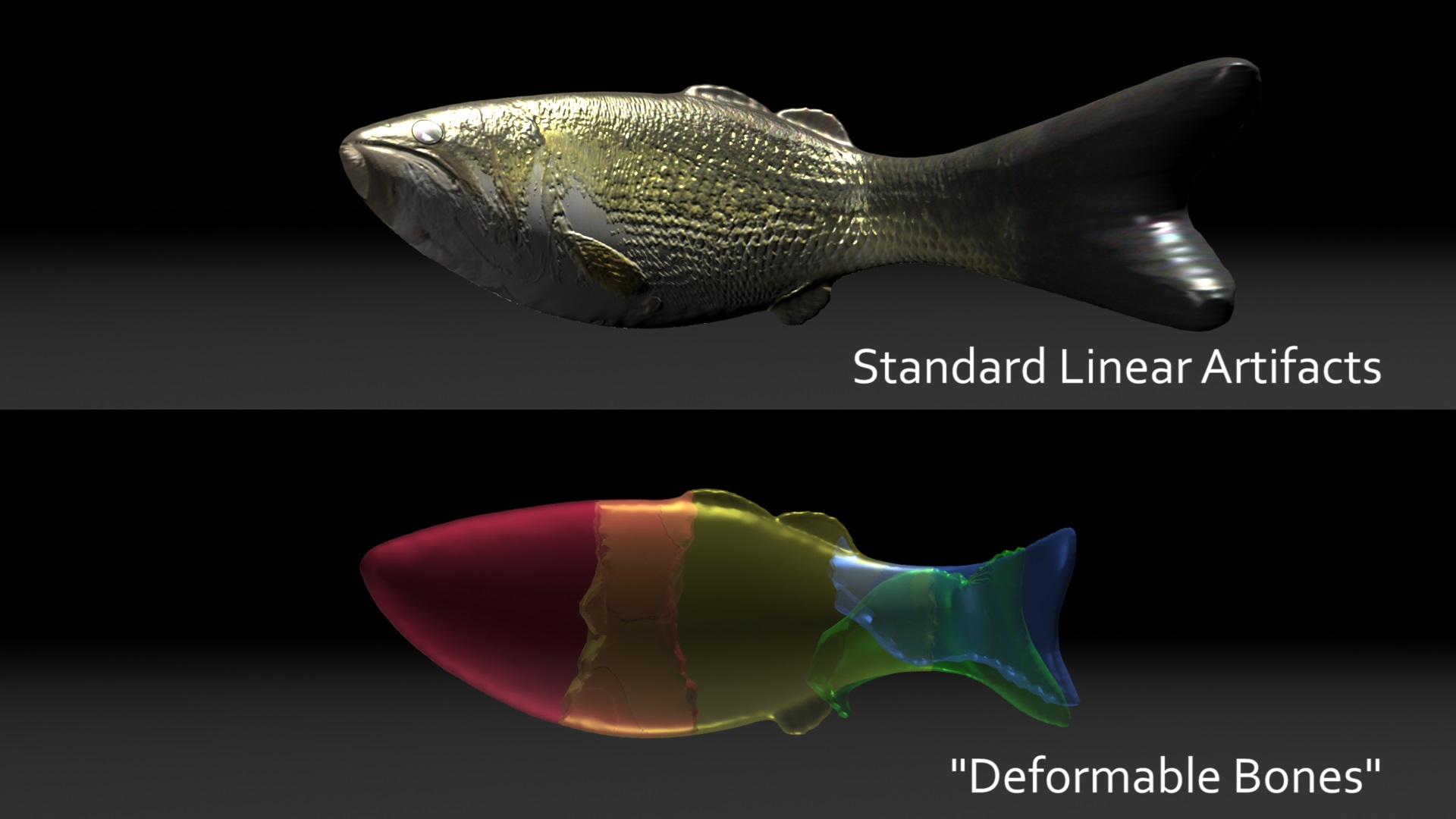
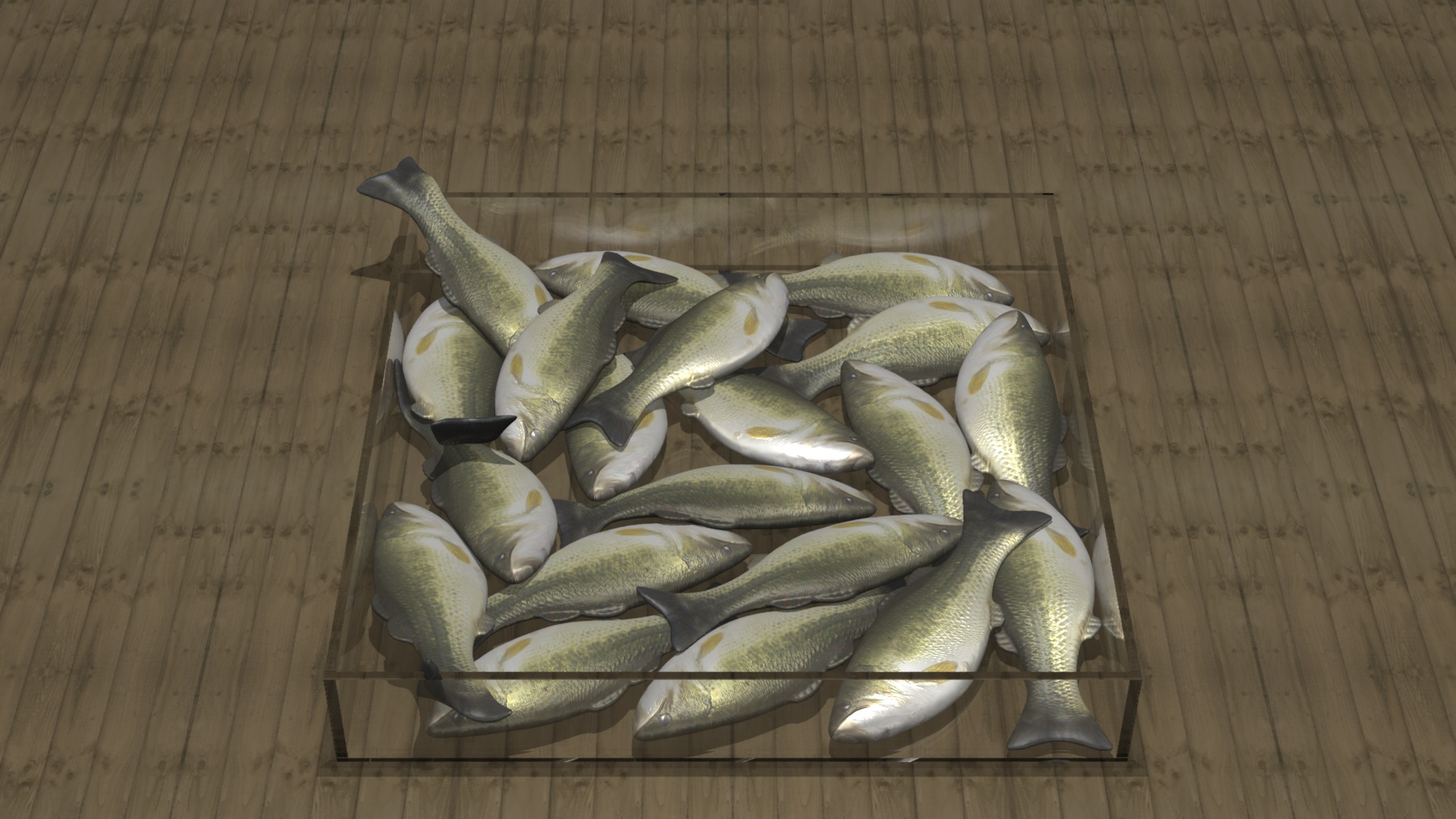
- Su, J., Sheth, R. and Fedkiw, R.,
"Energy Conservation for the Simulation of Deformable Bodies",
IEEE TVCG 19, 189-200 (2013).
- Schroeder, C., Kwatra, N., Zheng, W. and Fedkiw, R.,
"Asynchronous Evolution for Fully-Implicit and Semi-Implicit Time Integration",
Computer Graphics Forum (Pacific Graphics) 30, 1983-1992 (2011).
- Shinar, T., Schroeder, C. and Fedkiw, R.,
"Two-way Coupling of Rigid and Deformable Bodies",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by Doug James and Markus Gross, pp. 95-103 (2008).
- Sifakis, E., Shinar, T., Irving, G. and Fedkiw, R.,
"Hybrid Simulation of Deformable Solids",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by D. Metaxas and J. Popovic pp. 81-90 (2007).
Rigid Bodies & Articulated Rigid Bodies...
- Patkar, S., Aanjaneya, M., Bartle, A., Lee, M., and Fedkiw, R.,
"Efficient Denting and Bending of Rigid Bodies",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), (2014).
-
English, E., Lentine, M. and Fedkiw, R.,
"Interpenetration Free Simulation of Thin Shell Rigid Bodies",
IEEE TVCG 19, 991-1004 (2013).
- Su, J., Schroeder, C. and Fedkiw, R.,
"Energy Stability and Fracture for Frame Rate Rigid Body Simulations",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by Eitan Grinspun and Jessica Hodgins, pp. 155-164 (2009).
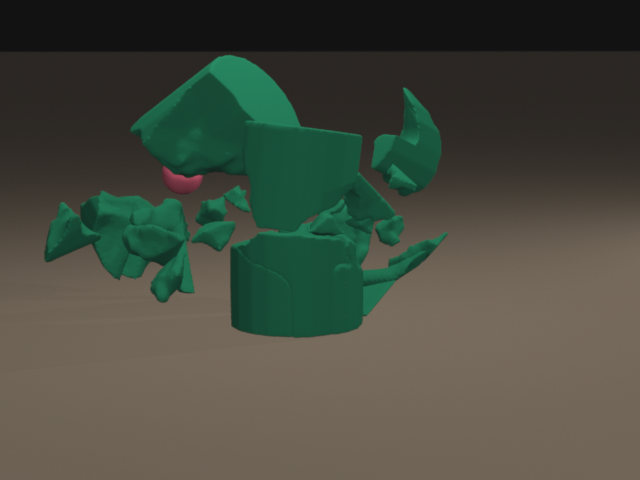
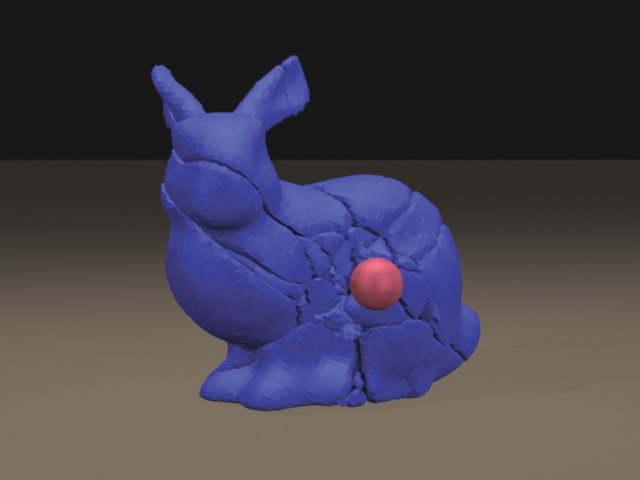
- Bao, Z., Hong, J.-M., Teran, J. and Fedkiw, R.,
"Fracturing Rigid Materials",
IEEE TVCG 13, 370-378 (2007).
- Weinstein, R., Teran, J. and Fedkiw, R.,
"Dynamic Simulation of Articulated Rigid Bodies with Contact and Collision",
IEEE TVCG 12, 365-374 (2006).
- Weinstein, R., Teran, J. and Fedkiw, R.,
"Pre-stabilization for Rigid Body Articulation with Contact and Collision",
SIGGRAPH 2005 Sketches and Applications, 2005.
- Guendelman, E., Bridson, R. and Fedkiw, R.,
"Nonconvex Rigid Bodies with Stacking",
SIGGRAPH 2003, ACM TOG 22, 871-878 (2003).
Hair & Fur...
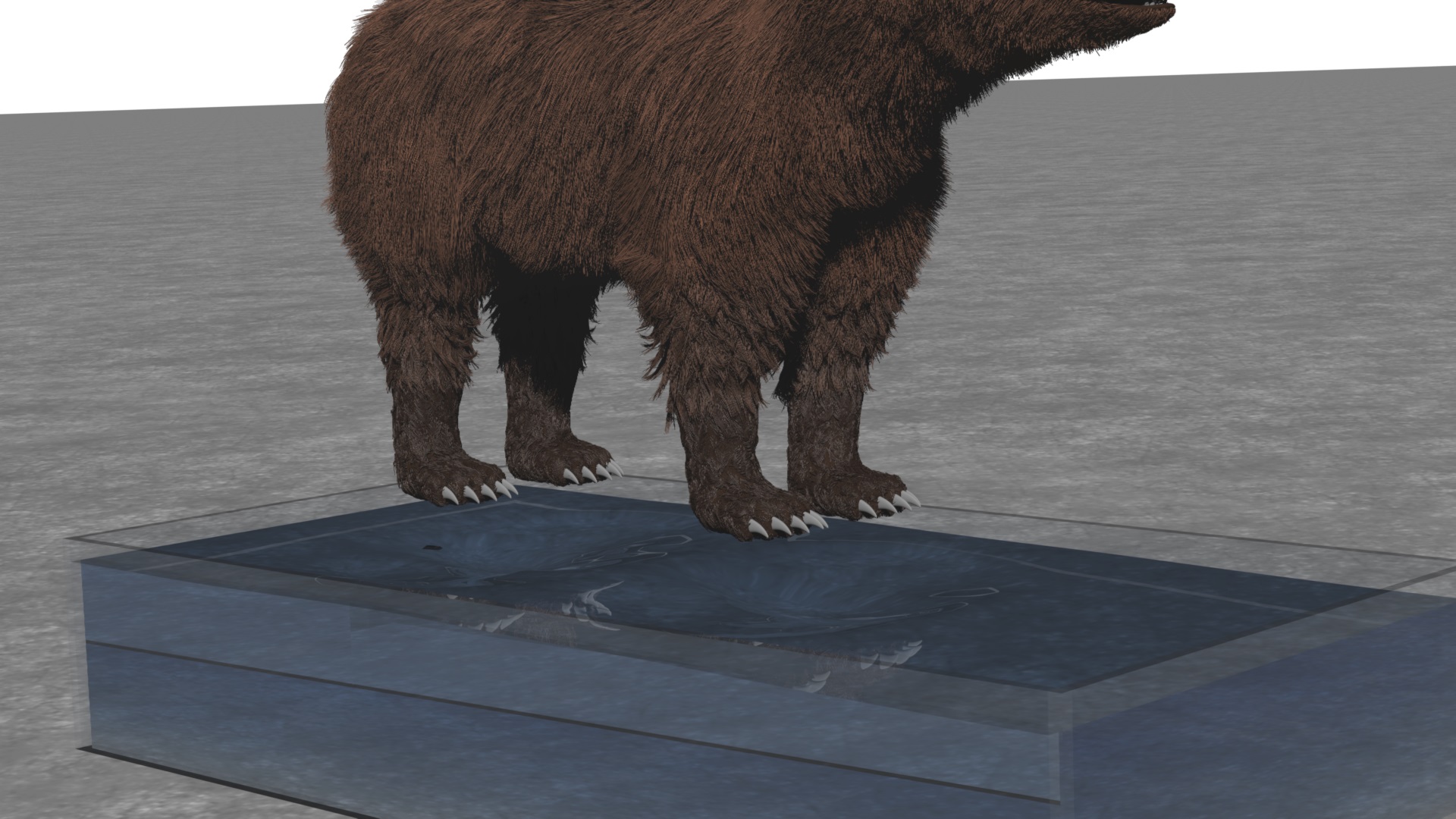
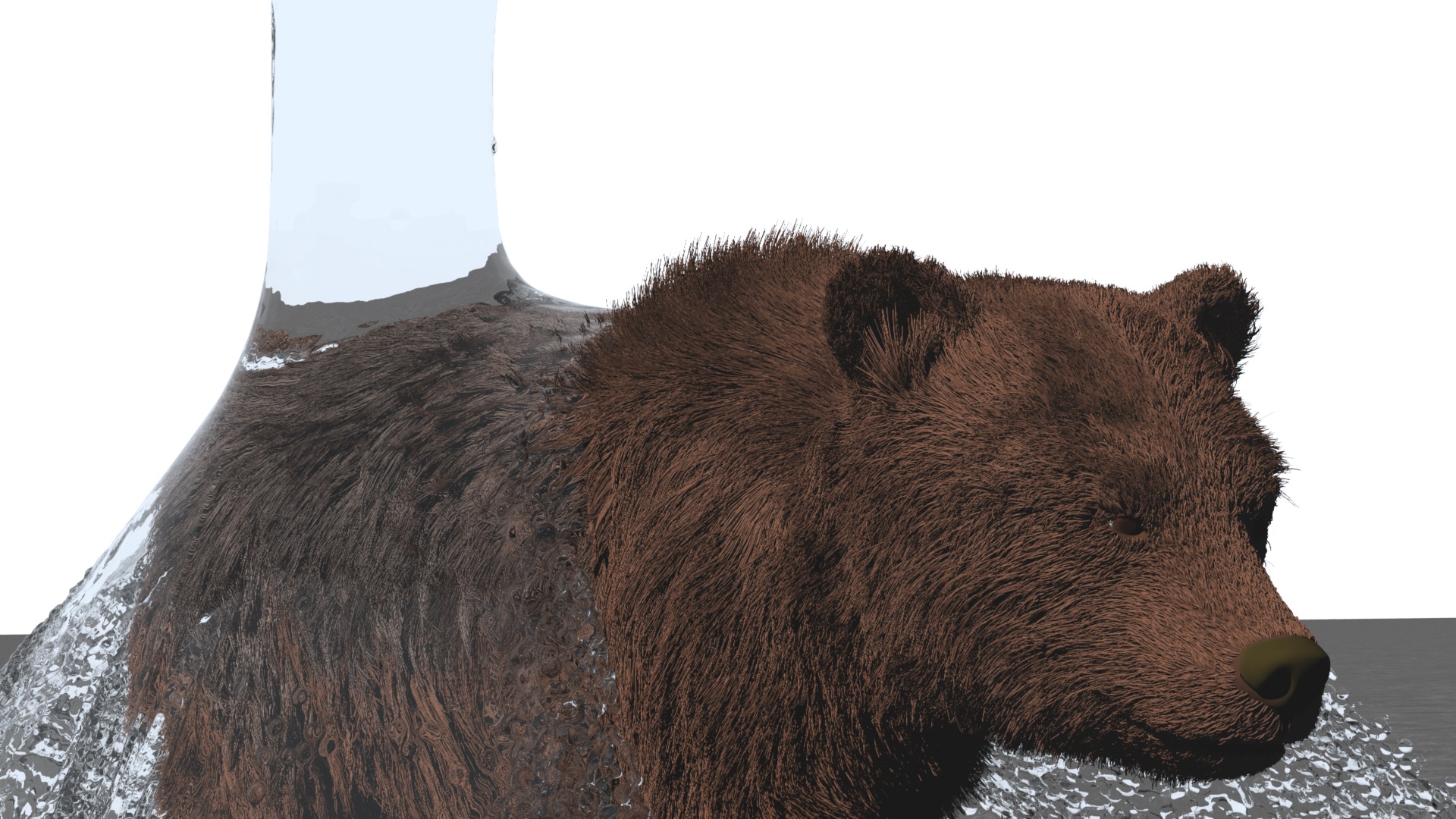
- Lee, M., Hyde, D., Li, K., and Fedkiw, R.,
"A Robust Volume Conserving Method for Character-Water Interaction", ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), (2019).
- Lee, M., Hyde, D., Bao, M., and Fedkiw, R.,
"A Skinned Tetrahedral Mesh for Hair Animation and Hair-Water Interaction",
IEEE TVCG (2018).
- Selle, A., Lentine, M. and Fedkiw, R.,
"A Mass Spring Model for Hair Simulation",
SIGGRAPH 2008, ACM TOG 27, 64.1-64.11 (2008).
Water, Smoke, & Fire...
- Zhu, B., Lee, M., Quigley, E., and Fedkiw, R.,
"Codimensional Non-Newtonian Fluids",
SIGGRAPH 2015, ACM TOG 34 (2015).
- Zhu, B., Quigley, E., Cong, M., Solomon, J., and Fedkiw, R.,
"Codimensional Surface Tension Flow on Simplicial Complexes",
SIGGRAPH 2014, ACM TOG 33 (2014).
- Patkar, S., Aanjaneya, M., Karpman, D., and Fedkiw, R.,
"A Hybrid Lagrangian-Eulerian Formulation for Bubble Generation and Dynamics",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), (2013).
- English, R. E., Qiu, L., Yu, Y., and Fedkiw, R.,
"Chimera Grids for Water Simulation",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), (2013).
- Zhu, B., Lu, W., Cong, M., Kim, B., and Fedkiw, R.,
"A New Grid Structure for Domain Extension",
SIGGRAPH 2013, ACM TOG 32, 63.1-63.8 (2013).
- Lentine, M., Cong, M., Patkar, S., and Fedkiw, R.,
"Simulating Free Surface Flow with Very Large Time Steps",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by P. Kry and J. Lee, pp. 107-116 (2012).
- Lentine, M., Aanjaneya, M. and Fedkiw, R.,
"Mass and Momentum Conservation for Fluid Simulation",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by A. Bargteil and M. van de Panne, pp. 91-100 (2011).
- Kwatra, N., Grétarsson, J. and Fedkiw, R.,
"Practical Animation of Compressible Flow for Shock Waves and Related Phenomena",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by M. Otaduy and Z. Popovic, pp. 207-215 (2010).
- Lentine, M., Zheng, W. and Fedkiw, R.,
"A Novel Algorithm for Incompressible Flow Using Only a Coarse Grid Projection",
SIGGRAPH 2010, ACM TOG (2010).
- Lentine, M.,Grétarsson, J., Schroeder, C., Robinson-Mosher, A. and Fedkiw, R.,
"Creature Control in a Fluid Environment",
IEEE TVCG 17, 682-693 (2011).
- Robinson-Mosher, A., English, E. and Fedkiw, R.,
"Accurate Tangential Velocities for Solid Fluid Coupling",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by Eitan Grinspun and Jessica Hodgins, pp. 227-236 (2009).
- Robinson-Mosher, A., Shinar, T., Grétarsson, J., Su, J. and Fedkiw, R.,
"Two-way Coupling of Fluids to Rigid and Deformable Solids and Shells",
SIGGRAPH 2008, ACM TOG 27, 46.1-46.9 (2008).
- Losasso, F., Talton, J., Kwatra, N. and Fedkiw, R.,
"Two-way Coupled SPH and Particle Level Set Fluid Simulation",
IEEE TVCG 14, 797-804 (2008).
- Hong, J.-M., Shinar, T. and Fedkiw, R.,
"Wrinkled Flames and Cellular Patterns",
SIGGRAPH 2007, ACM TOG 26, 47.1-47.6 (2007).
- Geiger, W., Leo, M., Rasmussen, N., Losasso, F. and Fedkiw, R.,
"So Real It'll Make You Wet",
SIGGRAPH 2006 Sketches and Applications, 2006.
- Losasso, F., Shinar, T. Selle, A. and Fedkiw, R.,
"Multiple Interacting Liquids",
SIGGRAPH 2006, ACM TOG 25, 812-819 (2006).
- Irving, G., Guendelman, E., Losasso, F. and Fedkiw, R.,
"Efficient Simulation of Large Bodies of Water by Coupling Two and Three Dimensional Techniques",
SIGGRAPH 2006, ACM TOG 25, 805-811 (2006).
- Losasso, F., Irving, G., Guendelman, E. and Fedkiw, R.,
"Melting and Burning Solids into Liquids and Gases",
IEEE TVCG 12, 343-352 (2006).
- Geiger, W., Rasmussen, N., Hoon, S. and Fedkiw, R.,
"Space Battle Pyromania",
SIGGRAPH 2005 Sketches and Applications, 2005.
- Guendelman, E., Selle, A., Losasso, F. and Fedkiw, R.,
"Coupling Water and Smoke to Thin Deformable and Rigid Shells",
SIGGRAPH 2005, ACM TOG 24, 973-981 (2005).
- Selle, A., Rasmussen, N. and Fedkiw, R.,
"A Vortex Particle Method for Smoke, Water and Explosions",
SIGGRAPH 2005, ACM TOG 24, 910-914 (2005).
- Fedkiw, R.,
"Making a Computational Splash",
Computer Science, Reflections on the Field, Reflections from the Field, pp. 61-64, The National Academies Press, Washington, 2004.
- Rasmussen, N., Enright, D., Nguyen, D., Marino. S., Sumner, N., Geiger, W., Hoon, S. and Fedkiw, R.,
"Directable Photorealistic Liquids",
ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA), edited by R. Boulic and D. Pai, pp. 193-202, 2004.
- Losasso, F., Gibou, F. and Fedkiw, R.,
"Simulating Water and Smoke with an Octree Data Structure",
SIGGRAPH 2004, ACM TOG 23, 457-462 (2004).
- Nguyen, D., Enright, D., and Fedkiw, R.,
"Simulation and Animation of Fire and Other Natural Phenomena in the Visual Effects Industry",
Western States Section, Combustion Institute, Fall Meeting, UCLA, 2003.
- Geiger, W., Rasmussen, N., Hoon, S. and Fedkiw, R.,
"Big Bangs",
SIGGRAPH 2003 Sketches and Applications, 2003.
- Sumner, N., Hoon, S., Geiger, W., Marino, S., Rasmussen, N. and Fedkiw, R.,
"Melting a Terminatrix",
SIGGRAPH 2003 Sketches and Applications, 2003.
- Rasmussen, N., Nguyen, D., Geiger, W. and Fedkiw, R.,
"Smoke Simulation for Large Scale Phenomena",
SIGGRAPH 2003, ACM TOG 22, 703-707 (2003).
- Fedkiw, R.,
"Simulating Natural Phenomena for Computer Graphics",
Geometric Level Set Methods in Imaging, Vision and Graphics, edited by S. Osher and N. Paragios, pp. 461-479, Springer Verlag, New York, 2003.
- Enright, D., Marschner, S. and Fedkiw, R.,
"Animation and Rendering of Complex Water Surfaces",
SIGGRAPH 2002, ACM TOG 21, 736-744 (2002).
- Nguyen, D., Fedkiw, R. and Jensen, H.,
"Physically Based Modeling and Animation of Fire",
SIGGRAPH 2002, ACM TOG 21, 721-728 (2002).
- Foster, N. and Fedkiw, R.,
"Practical Animation of Liquids",
SIGGRAPH 2001, 15-22 (2001).
- Fedkiw, R., Stam, J. and Jensen, H.W.,
"Visual Simulation of Smoke",
SIGGRAPH 2001, 23-30 (2001).
Computational Physics...
-
Gibou, F., Fedkiw, R., Caflisch, R., and Osher, S., "A Review of Level-set Modeling in Epitaxial Growth and Alloys Solidification", Modelling Simul. Mater. Sci. Eng. 34, 013001 (2026).
- NEURAL NETWORKS, OPTIMIZATION
Johnson, D. and Fedkiw, R., "Addressing Discontinuous Root-Finding for Subsequent Differentiability in Machine Learning, Inverse Problems, and Control", J. Comp. Phys. 497, 112624 (2024).
- NEURAL NETWORKS, OPTIMIZATION
Johnson, D., Maxfield, T., Jin, Y. and Fedkiw, R., "Software-based Automatic Differentiation is Flawed", arXiv:2305.03863 (May 2023).
- OPTIMIZATION Hyde, D., Bao, M., and Fedkiw, R., "On Obtaining Sparse Semantic Solutions for Inverse Problems, Control, and Neural Network Training", J. Comp. Phys. 443, 110498 (2021).
-
Hyde, D. and Fedkiw, R., "A Unified Approach to Monolithic Solid-Fluid Coupling of Sub-Grid and More Resolved Solids", J. Comp. Phys. 390, 490-526 (2019).
-
Gibou, F., Hyde, D., and Fedkiw, R., "Sharp Interface Approaches and Deep Learning Techniques for
Multiphase Flows", J. Comp. Phys. 380, 442-463 (2019).
-
Gibou, F., Fedkiw, R., and Osher, S., "A Review of Level-Set Methods and Some Recent Applications", J. Comp. Phys. 353, 82-109 (2018).
-
Patkar, S., Aanjaneya, M., Lu, W., Lentine, M. and Fedkiw, R., "Towards Positivity Preservation for Monolithic Two-way Solid-Fluid Coupling", J. Comp. Phys. 312, 82-114 (2016).
-
Qiu, L., Lu, W. and Fedkiw, R., "An Adaptive Discretization of Compressible Flow using a Multitude of Moving Cartesian Grids", J. Comp. Phys. 305, 75-110 (2016).
-
Qiu, L., Yu, Y. and Fedkiw, R., "On Thin Gaps Between Rigid Bodies Two-way Coupled to Incompressible Flow", J. Comp. Phys. 292, 1-29 (2015).
-
Zheng, W., Zhu, B., Kim, B. and Fedkiw, R., "A New Incompressibility Discretization for a Hybrid Particle MAC Grid Representation with Surface Tension", J. Comp. Phys. 280, 96-142 (2015).
-
English, R. E., Qiu, L., Yu, Y. and Fedkiw, R., "An Adaptive Discretization of Incompressible Flow using a Multitude of Moving Cartesian Grids", J. Comp. Phys. 254, 107-154 (2013).
-
Aanjaneya, M., Patkar, S. and Fedkiw, R., "A Monolithic Mass Tracking Formulation for Bubbles in Incompressible Flow", J. Comp. Phys. 247, 17-61 (2013).
-
Gibou, F., Min, C., and Fedkiw, R., "High Resolution Sharp Computational Methods for Elliptic and Parabolic Problems in Complex Geometries", J. Sci. Comput. 54, 369-413 (2013).
- Grétarsson, J. and Fedkiw, R.,
"Fully Conservative Leak-Proof Treatment of Thin Solid Structures Immersed in Compressible Fluids",
J. Comp. Phys. 245, 160-204 (2013).
- Schroeder, C., Zheng, W., and Fedkiw, R.,
"Implicit Surface Tension Formulation with a Lagrangian Surface Mesh on an Eulerian Simulation Grid",
J. Comp. Phys. 231, 2092-2115 (2012).
- Lentine, M., Grétarsson, J. and Fedkiw, R.,
"An Unconditionally Stable Fully Conservative Semi-Lagrangian Method",
J. Comp. Phys. 230, 2857-2879 (2011).
- Grétarsson, J., Kwatra, N. and Fedkiw, R.,
"Numerically Stable Fluid-Structure Interactions Between Compressible Flow and Solid Structures",
J. Comp. Phys. 230, 3062-3084 (2011).
- Robinson-Mosher, A., Schroeder, C. and Fedkiw, R.,
"A Symmetric Positive Definite Formulation for Monolithic Fluid Structure Interaction",
J. Comp. Phys. 230, 1547-1566 (2011).
- Kwatra, N., Su, J., Grétarsson, J. and Fedkiw, R.,
"A Method for Avoiding the Acoustic Time-Step Restriction in Compressible Flow",
J. Comp. Phys. 228, 4146-4161 (2009).
- Selle, A., Fedkiw, R., Kim, B.-M., Liu, Y. and Rossignac, J.,
"An Unconditionally Stable MacCormack Method",
J. Sci. Comput. 35, 350-371 (2008).
- Hong, J.-M., Shinar, T., Kang, M. and Fedkiw, R.,
"On Boundary Condition Capturing for Multiphase Interfaces",
J. Sci. Comput. 31, 99-125 (2007).
- Losasso, F., Fedkiw, R. and Osher,
"Spatially Adaptive Techniques for Level Set Methods and Incompressible Flow",
Computers and Fluids 35, 995-1010 (2006).
- Bridson, R., Teran, J., Molino, N. and Fedkiw, R.,
"Adaptive Physics Based Tetrahedral Mesh Generation Using Level Sets",
Engineering with Computers 21, 2-18 (2005).
- Enright, D., Losasso, F. and Fedkiw, R.,
"A Fast and Accurate Semi-Lagrangian Particle Level Set Method",
Computers and Structures 83, 479-490 (2005).
- Gibou, F. and Fedkiw, R.,
"A Fourth Order Accurate Discretization for the Laplace and Heat Equations on Arbitrary Domains, with Applications to the Stefan Problem",
J. Comput. Phys. 202, 577-601 (2005).
- Molino, N., Bridson, R., Teran, J. and Fedkiw, R.,
"A Crystalline, Red Green Strategy for Meshing Highly Deformable Objects with Tetrahedra",
12th Int. Meshing Roundtable, 103-114, 2003.
- Enright, D., Nguyen, D., Gibou, F. and Fedkiw, R.,
"Using the Particle Level Set Method and a Second Order Accurate Pressure Boundary Condition for Free Surface Flows",
Proc. of the 4th ASME-JSME Joint Fluids Eng. Conf., FEDSM2003-45144, edited by M. Kawahashi and A. Ogut and Y. Tsuji, pp. 1-6, Honolulu, HI 2003.
- Enright, D. and Fedkiw, R.,
"Robust Treatment of Interfaces for Fluid Flow and Computer Graphics",
Hyperbolic Problems: Theory, Numerics, Applications, edited by T. Hou and E. Tadmor, pp. 153-164, Springer-Verlag, New York, 2003.
- Nguyen, D., Gibou, F. and Fedkiw, R.,
"A Fully Conservative Ghost Fluid Method & Stiff Detonation Waves",
12th Int. Detonation Symposium, San Diego, CA, 2002.
- Gibou, F., Fedkiw, R. Caflisch, R. and Osher S.,
"A Level Set Approach for the Numerical Simulation of Dendritic Growth",
J. Sci. Comput. 19, 183-199 (2003).
- Fedkiw, R., Sapiro, G. and Shu, C.-W.,
"Shock Capturing, Level Sets and PDE Based Methods in Computer Vision and Image Processing: A Review on Osher's Contribution",
J. Comput. Phys. 185, 309-341 (2003).
- Enright, D., Fedkiw, R., Ferziger, J. and Mitchell, I.,
"A Hybrid Particle Level Set Method for Improved Interface Capturing",
J. Comput. Phys. 183, 83-116 (2002).
- Gibou, F., Fedkiw, R., Cheng, L.-T. and Kang, M.,
"A Second Order Accurate Symmetric Discretization of the Poisson Equation on Irregular Domains",
J. Comput. Phys. 176, 205-227 (2002).
- Nguyen, D., Fedkiw, R. and Kang, M.,
"A Boundary Condition Capturing Method for Incompressible Flame Discontinuities",
J. Comput. Phys. 172, 71-98 (2001).
- Fedkiw, R.,
"Coupling an Eulerian Fluid Calculation to a Lagrangian Solid Calculation with the Ghost Fluid Method",
J. Comput. Phys. 175, 200-224 (2002).
- Osher, S. and Fedkiw, R.,
"Level Set Methods: An Overview and Some Recent Results",
J. Comput. Phys. 169, 463-502 (2001).
- Chen, S., Merriman, B., Kang, M., Caflisch, R., Ratsch, C., Cheng, L.-T., Gyure, M., Fedkiw R., Anderson,C. and Osher, S.,
"Level Set Method for Thin Film Epitaxial Growth",
J. Comput. Phys. 167, 475-500 (2001).
- Caiden, R., Fedkiw, R. and Anderson, C.,
"A Numerical Method for Two Phase Flow Consisting of Separate Compressible and Incompressible Regions",
J. Comput. Phys. 166, 1-27 (2001).
- Fedkiw, R.,
"The Ghost Fluid Method for Discontinuities and Interfaces",
Godunov Methods, edited by E.F. Toro, pp. 309-317, Kluwer, New York 2001.
- Kang, M., Fedkiw, R. and Liu, X.-D.,
"A Boundary Condition Capturing Method for Multiphase Incompressible Flow",
J. Sci. Comput. 15, 323-360 (2000).
- Liu, X.-D., Fedkiw, R. and Kang, M.,
"A Boundary Condition Capturing Method for Poisson's Equation on Irregular Domains",
J. Comput. Phys. 160, 151-178 (2000).
- Hwang, P., Fedkiw, R., Merriman, B., Aslam, T., Karagozian, A. and Osher, S.,
"Numerical Resolution of Pulsating Detonation Waves",
Combustion Theory and Modeling 4, 217-240 (2000).
- Fedkiw, R. and Liu, X.-D.,
"The Ghost Fluid Method for Viscous Flows",
Innovative Methods for Numerical Solutions of Partial Differential Equations, edited by M. Hafez and J.-J. Chattot, pp. 111-143, World Scientific Publishing, New Jersey, 2002.
- Fedkiw, R., Aslam, T. and Xu, S.,
"The Ghost Fluid Method for Deflagration and Detonation Discontinuities",
J. Comput. Phys. 154, 393-427 (1999).
- Fedkiw, R., Aslam, T., Merriman, B. and Osher, S.,
"A Non-Oscillatory Eulerian Approach to Interfaces in Multimaterial Flows (The Ghost Fluid Method)",
J. Comput. Phys. 152, 457-492 (1999).
- Fedkiw, R., Merriman, B. and Osher, S.,
"Simplified Upwind Discretization of Systems of Hyperbolic Conservation Laws Containing Advection Equations",
J. Comput. Phys. 157, 302-326 (2000).
- Liu, X.-D., Fedkiw, R., and Osher, S.,
"A Quasi-Conservative Approach to the Multiphase Euler Equations without Spurious Pressure Oscillations",
Advances in Scientific Computing, 106-115, edited by Z.-C. Shi, M. Mu, W. Xue and J. Zou, Science Press Beijing/New York 2001.
- Fedkiw, R., Marquina, A. and Merriman, B.,
"An Isobaric Fix for the Overheating Problem in Multimaterial Compressible Flows",
J. Comput. Phys. 148, 545-578 (1999).
- Fedkiw, R., Liu, X.-D. and Osher, S.,
"A General Technique for Eliminating Spurious Oscillations in Conservative Schemes for Multiphase and Multispecies Euler Equations",
Int. J. Nonlinear Sci. and Numer. Sim. 3, 99-106 (2002).
- Fedkiw, R., Merriman, B. and Osher, S.,
"Efficient Characteristic Projection in Upwind Difference Schemes for Hyperbolic Systems (The Complementary Projection Method)",
J. Comput. Phys. 141, 22-36 (1998).
- Fedkiw, R., Merriman, B. and Osher, S.,
"Numerical Methods for a One-Dimensional Interface Separating Compressible and Incompressible Flows",
Barriers and Challenges in Computational Fluid Dynamics, edited by V. Venkatakrishnan, M. Salas, and S. Chakravarthy, pp. 155-194, Kluwer Academic Publishers, The Netherlands, 1998.
- Fedkiw, R., Merriman, B., Donat, R. and Osher, S.,
"The Penultimate Scheme for Systems of Conservation Laws: Finite Difference ENO with Marquina's Flux Splitting",
Innovative Methods for Numerical Solutions of Partial Differential Equations, edited by M. Hafez and J.-J. Chattot, pp. 49-85, World Scientific Publishing, New Jersey, 2002.
- Fedkiw, R., Merriman, B. and Osher, S.,
"Numerical Methods for a Mixture of Thermally Perfect and/or Calorically Perfect Gaseous Species with Chemical Reactions",
J. Comput. Phys. 132, 175-190 (1997).
A Ph.D. Thesis
The bar for graduation is a publishable thesis. This means becoming an expert in an area so that you can do novel research and defend it to three separate entities:
your advisor, your oral committee and readers, journal/conference paper reviewers. Each entity may require extra work beyond your original contribution, and you
should be able to satisfy these requirements in order to properly defend your thesis.
- Sometimes students are allowed to graduate early without fully defending their thesis to journal/conference paper reviewers.
This happens in the context of an honor code where it is fully expected that the student will complete the rest of their work by fully defending
their thesis to journal/conference paper reviewers.
- 39 of my prior 42 PhD students have executed well in this sense, but 3 recent graduates have compelled a change in my policy:
- Winnie Lin - has apologetically stated that she doesn't have time to address reviewer concerns. She would have had this time if I had not let her graduate early.
- Yilin Zhu - simply doesn't answer emails directed at him about publishing. This is surprising since I put my reputation on the line vouching for him to his oral committee and readers. They were right. I was wrong.
- Yongxu Jin - published one of the two papers that made up the main contribution of his thesis. However, when reviewers asked for revisions of the second paper, he resubmitted the original version shocking the reviewers (who rejected the paper). I apologize to those anonymous reviewers! He claimed that he was too busy to make changes. He would have had this time if I had not let him graduate early.
- Many faculty require that Ph.D. students have significant first author publications completed before graduating, and I have now changed my policy as well.
Students
Ph.D. Students
- Kevin (Kevli) Li
- Sarah Jobalia
Technology & Racial Equity Graduate Fellow and Ford Fellow
- Demi Guo
- Haodi He
- Yitong Deng
- Sharon Lee
Knight-Hennessy Scholar
Former Ph.D. Students
Former Postdoctoral Scholars
A Note on Rejected Papers
All too often young researchers get discouraged when they receive peer reviews that are incorrect, misinformed, or all too often merely intended to silence the authors and their ideas.
Personally, I have always been amazed that academics who devote their lives to producing new information actually work to censure and diminish the work produced by others,
and often take pride in doing just that. As time goes on, one learns to distinguish between those in academia who love the work and those that have instead turned academia
into some sort of career aggressively optimizing their stature at the expense of the community as a whole. For young researchers this can be quite daunting, but I strongly
encourage you to stick to your ideas and goals and the pursuit of what interests you. Remember, the content of your paper and the value of its ideas are not diminished because it
was rejected from your preferred venue. The content of the paper itself does not change because of the name of the journal printed on the upper corner of the page!
To emphasize this, I decided to list my 3 most cited REJECTED papers along with their google scholar citation counts:
"A Boundary Condition Capturing Method for Multiphase Incompressible Flow", 958 citations, rejected from J. Comp. Phys.
"Simulation of Clothing with Folds and Wrinkles", 781 citations, rejected from Siggraph
"Fast Surface Reconstruction using the Level Set Method", 630 citations, rejected from Siggraph
Research
- A Neural-Network-Based Approach for Loose-Fitting Clothing (with Yongxu Jin, Dalton Omens, Zhenglin Geng, Joseph Teran, Abishek Kumar, and Kenji Tashiro).
- Analytically Integratable Zero-restlength Springs for Capturing Dynamic Modes unrepresented by Quasistatic Neural Networks (with Yongxu Jin, Yushan Han, Zhenglin Geng, and Joseph Teran).
-
Skinning a Parameterization of Three-Dimensional Space for Neural Network Cloth (with Jane Wu, Zhenglin Geng, and Hui Zhou).
-
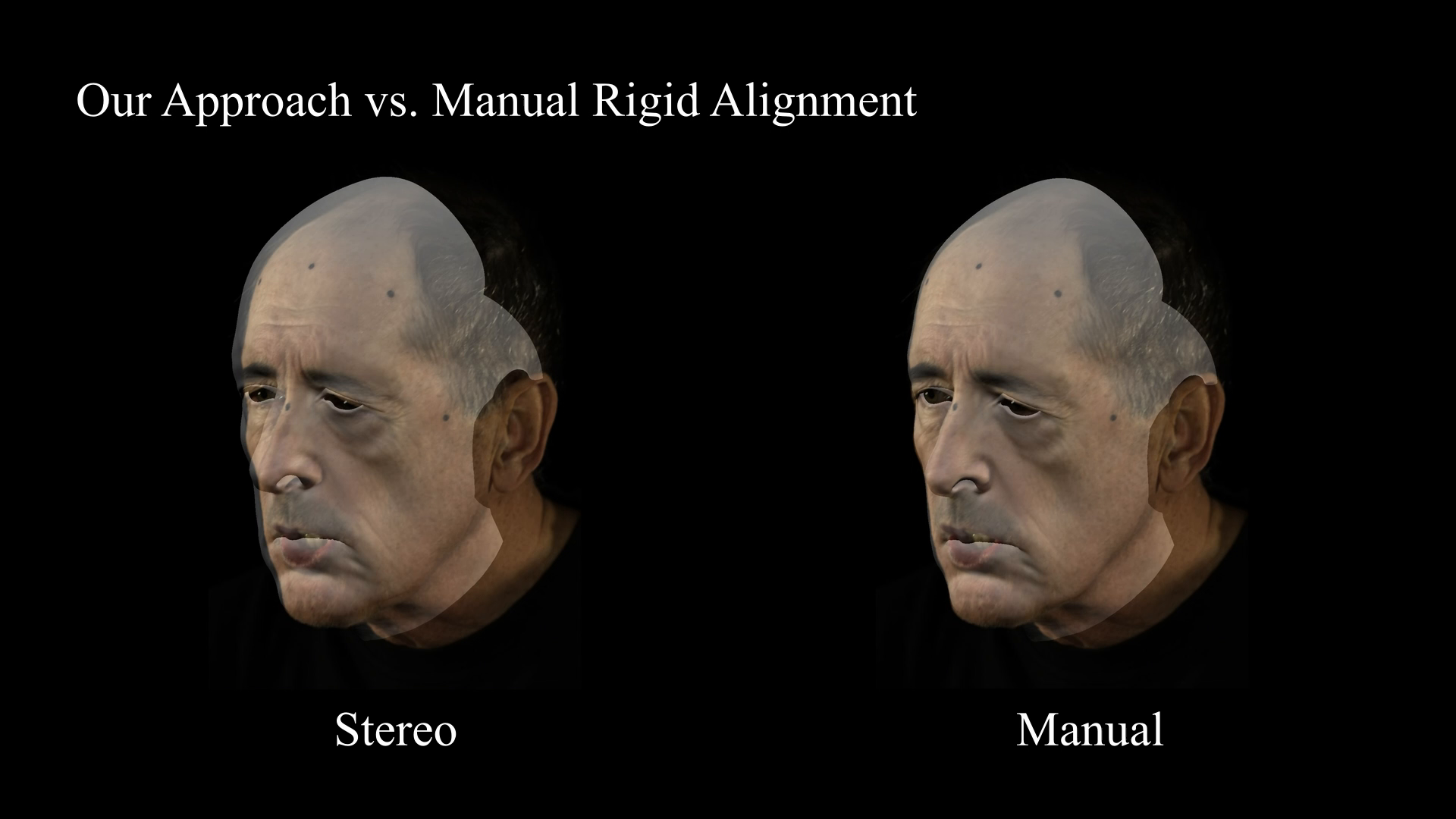
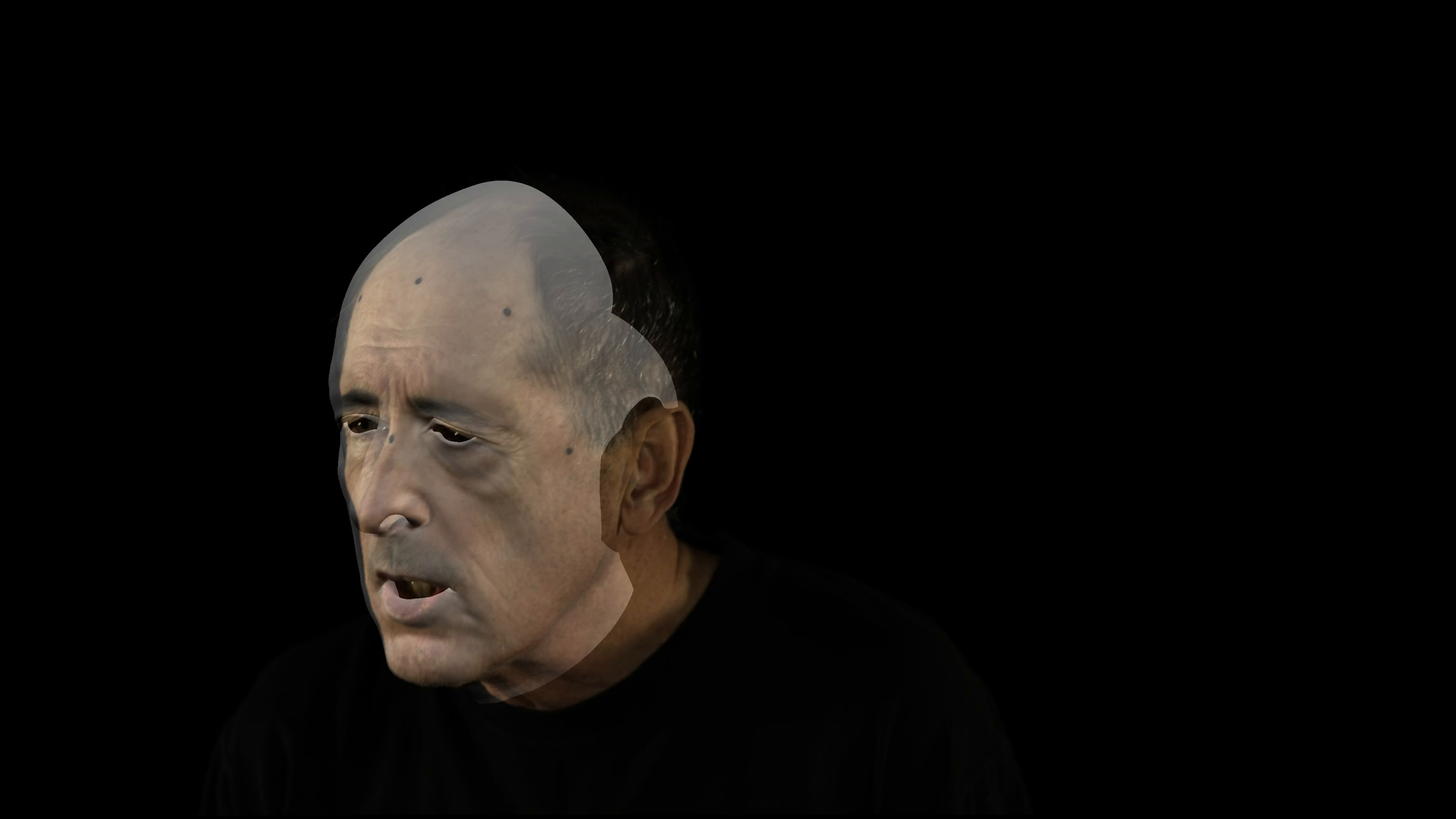
High-Quality Face Capture Using Anatomical Muscles (with Michael Bao, Matthew Cong, and Stéphane Grabli).

-
Improved Search Strategies for Determining Facial Expression (with Michael Bao, and Xinru Hua).
-
Deep Energies for Estimating Three-Dimensional Facial Pose and Expression (with Michael Bao, Jane Wu, and Xinwei Yao).
-
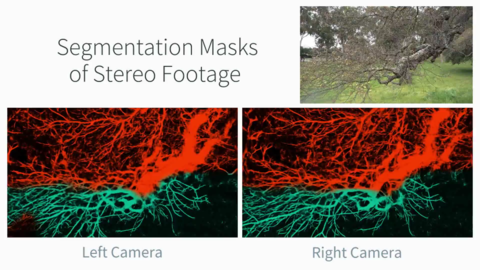
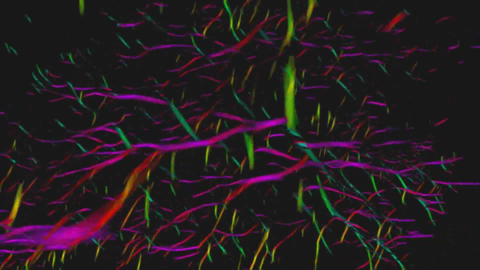
Three Dimensional Reconstruction of Botanical Trees with Simulatable Geometry (with Ed Quigley, Winnie Lin, and Yilin Zhu).




-
A Pixel-Based Framework for Data-Driven Clothing (with Ning Jin, Yilin Zhu, and Zhenglin Geng).

-
A Skinned Tetrahedral Mesh for Hair Animation and Hair-Water Interaction (with Minjae Lee, David Hyde, and Michael Bao).



-
Inequality Cloth (with Ning Jin, Wenlong Lu, and Zhenglin Geng).




-
Real-time Interactive Tree Animation (with Ed Quigley, Yue Yu, Jingwei Huang, and Winnie Lin).




-
Art-Directed Muscle Simulation for High-End Facial Animation (with Matthew Cong and Kiran Bhat).
-
Two-way Coupling of Fluids to Reduced Deformable Bodies (with Wenlong Lu and Ning Jin).


-
A New Sharp-Crease Bending Element for Folding and Wrinkling of Surfaces and Volumnes (with Saket Patkar and Ning Jin).

-
Fully Momentum-Conserving Reduced Deformable Bodies with Collision, Contact, Articulation, and Skinning (with Rahul Sheth, Wenlong Lu, and Yue Yu).

-
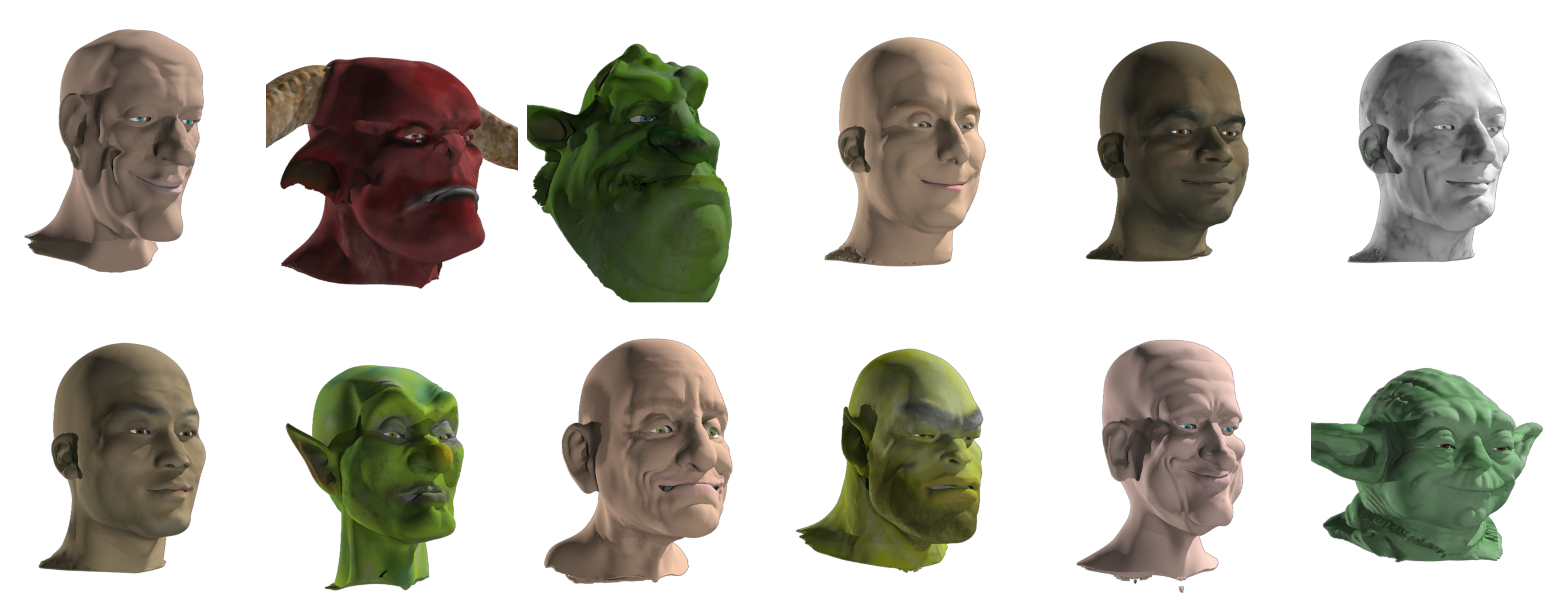
Fully Automatic Generation of Anatomical Face Simulation Models (with Matthew Cong, Michael Bao, Jane E, and Kiran Bhat).

-
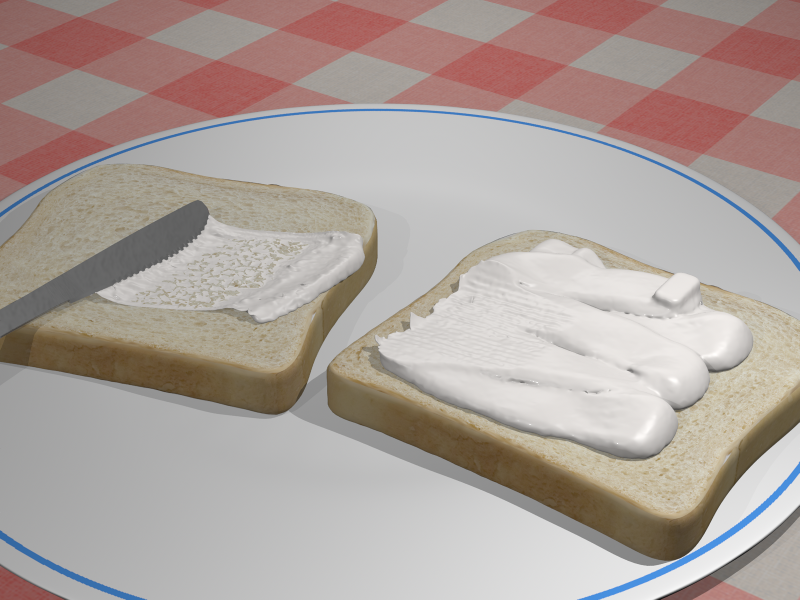
Codimensional Non-Newtonian Fluids (with Bo Zhu, Minjae Lee, and Ed Quigley).

-
Efficient Denting and Bending of Rigid Bodies (with Saket Patkar, Mridul Aanjaneya, Aric Bartle, and Minjae Lee).


-
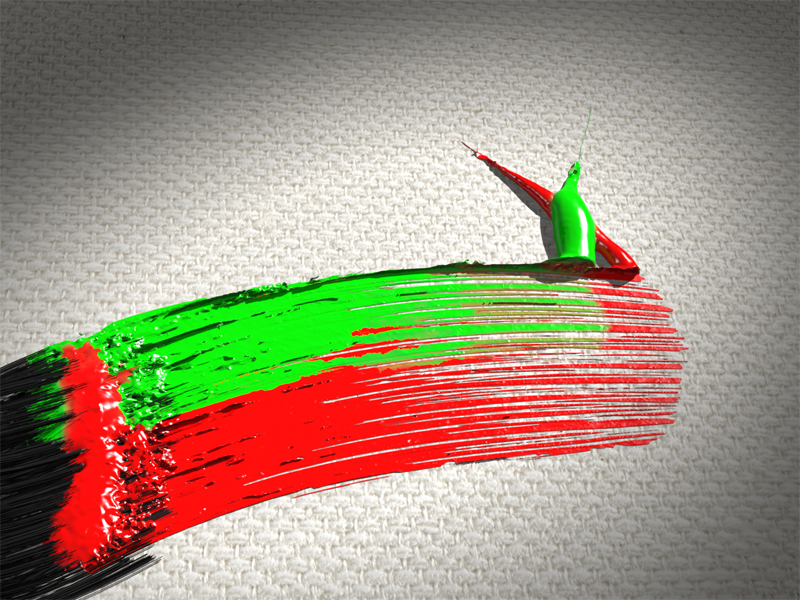
Codimensional Surface Tension Flow on Simplicial Complexes (with Bo Zhu, Ed Quigley, Matthew Cong, and Justin Solomon).


-
A New Incompressibility Discretization for a Hybrid Particle MAC Grid Representation with Surface Tension (with Wen Zheng, Bo Zhu, and Byungmoon Kim).
-
A Hybrid Lagrangian-Eulerian Formulation for Bubble Generation and Dynamics (with Saket Patkar, Mridul Aanjaneya, and Dmitriy Karpman).


-
Chimera Grids for Water Simulation (with Elliot English, Linhai Qiu, and Yue Yu).


-
A New Grid Structure for Domain Extension (with Bo Zhu, Wenlong Lu, Matthew Cong, and Byungmoon Kim).



-
Simulating Free Surface Flow with Very Large Time Steps (with Michael Lentine, Matthew Cong, and Saket Patkar).

-
Energy Conservation for the Simulation of Deformable Bodies (with Jon Su and Rahul Sheth).

-
Mass and Momentum Conservation for Fluid Simulation (with Michael Lentine and Mridul Aanjaneya).


-
Practical Animation of Compressible Flow for Shock Waves and Related Phenomena (with Nipun Kwatra and Jón Grétarsson).

-
A Novel Algorithm for Incompressible Flow Using Only a Coarse Grid Projection (with Michael Lentine and Wen Zheng).


-
Energy Stability and Fracture for Framerate Rigid Body Simulations (with Jon Su and Craig Schroeder).

-
Simulating virtual soft bodied creatures with actuated internal rigid skeletal structures (with Tamar Shinar and Craig Schroeder).



-
Two-way coupling of rigid and deformable solids (with Tamar Shinar and Craig Schroeder).

-
Stable, two-way solid fluid coupling (with Avi Robinson-Mosher, Tamar Shinar, Jón Grétarsson and Jon Su).

-
Hair simulation (with Andrew Selle and Michael Lentine).


-
Highly detailed cloth simulation (with Andrew Selle, Jon Su and Geoffrey Irving).

-
Two way coupled SPH and particle level set fluid simulation (with Frank Losasso, Jerry Talton and Nipun Kwatra).

-
Hybrid simulation of embedded deformable solids and rigid bodies (with Eftychios Sifakis, Tamar Shinar and Geoffrey Irving).

-
Arbitrary cutting of tetrahedral meshes (with Eftychios Sifakis and Kevin Der).


-
Fire with cellular patterns (with Jeong-Mo Hong and Tamar Shinar).



-
Incompressible solids (with Geoffrey Irving and Craig Schroeder).

-
Fracturing rigid bodies (with Josh Bao, Jeong-Mo Hong and Joey Teran).

-
Thin shell rigid bodies (with Josh Bao, Jeong-Mo Hong and Joey Teran).

-
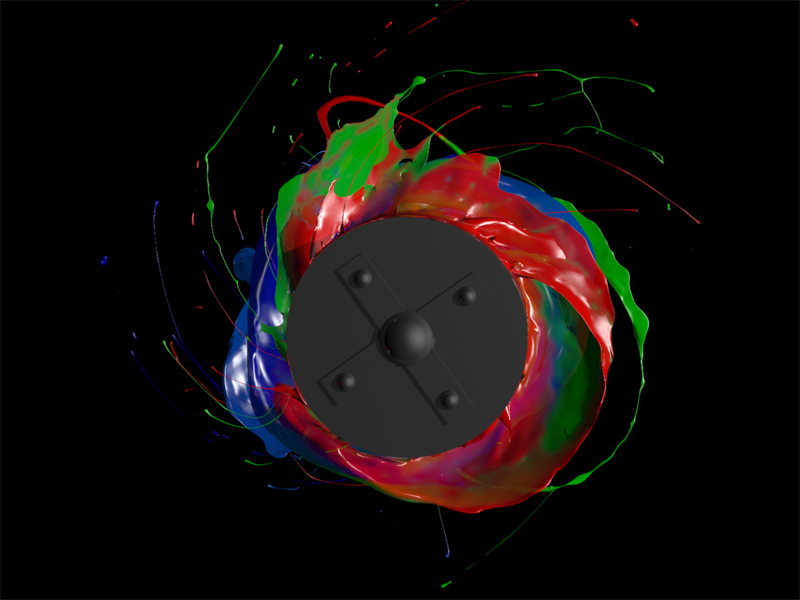
Multiple Interacting Liquids (with Frank Losasso, Tamar Shinar and Andrew Selle).


-
Mixing fully 3D water with 2D height field techniques (with Geoffrey Irving, Eran Guendelman and Frank Losasso).

-
Articulated rigid body simulations (with Rachel Weinstein and Joey Teran).



-
Melting and burning Lagrangian based solids into Eulerian based fluids (with Frank Losasso, Geoffrey Irving and Eran Guendelman).


-
Robust invertible quasistatic simulations for skinning (with Joey Teran, Eftychios Sifakis and Geoffrey Irving).


-
Automatic estimation of facial muscle activations from sparse motion capture marker data (with Eftychios Sifakis and Igor Neverov).


-
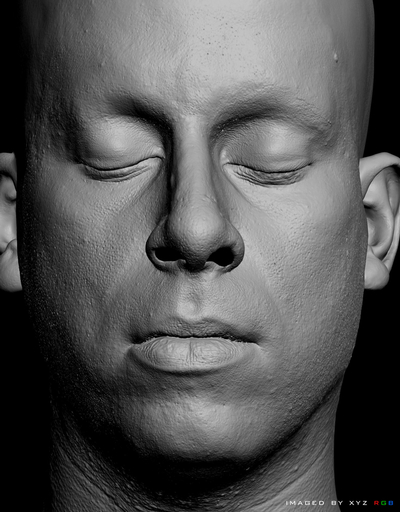
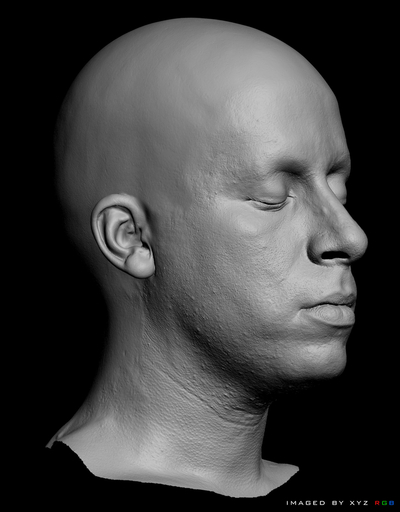
We're currently building a higher resolution facial model (with Eftychios Sifakis and xyzrgb).



-
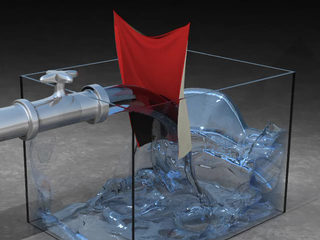
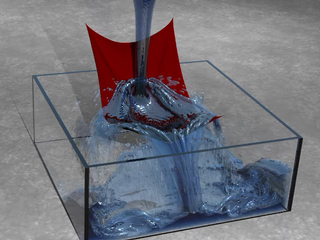
Two-way solid fluid coupling with thin rigid and deformable solids (with Eran Guendelman, Andrew Selle and Frank Losasso).


-
Fluid simulations using a Lagrangian vortex particle method hybridized with an Eulerian grid based solver (with Andrew Selle and Nick Rasmussen).


-
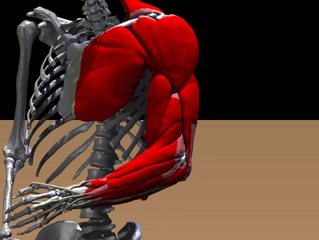
Animations of muscles constructed from the NIH visible human data set (with Joseph Teran, Eftychios Sifakis and Cynthia Lau).

-
Robust finite element simulation, even for degenerate and inverted elements (with Geoffrey Irving and Joey Teran).

-
Simulations of changing mesh topology during simulation (with Neil Molino and Zhaosheng Bao).

-
Simulations on an octree data structure (with Frank Losasso and Frederic Gibou).

-
Animations of rigid bodies (with Eran Guendelman and Robert Bridson).

-
Tetrahedral mesh generation (with Neil Molino, Robert Bridson and Joseph Teran).
-
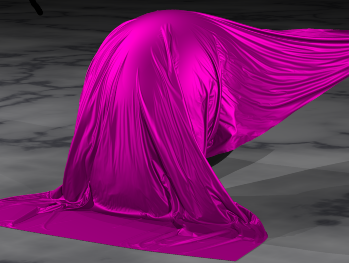
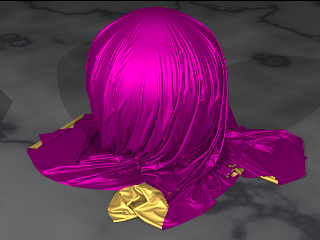
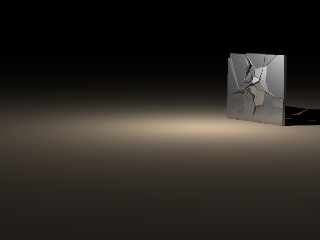
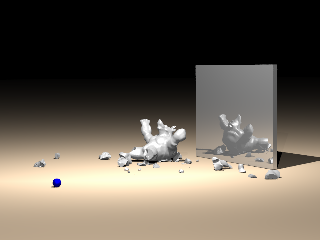
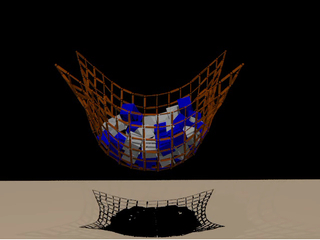
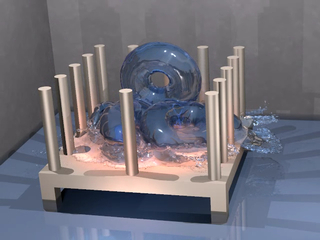
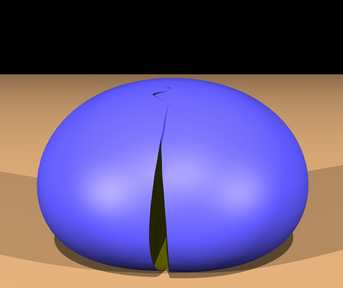
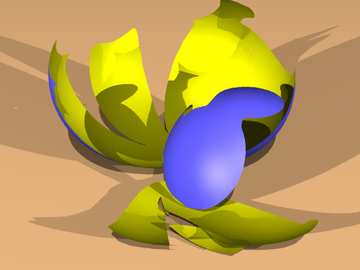
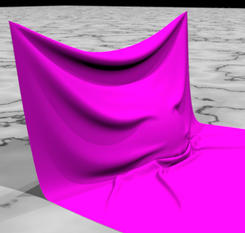
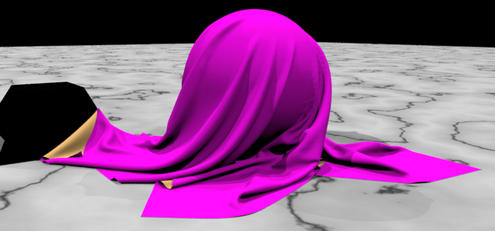
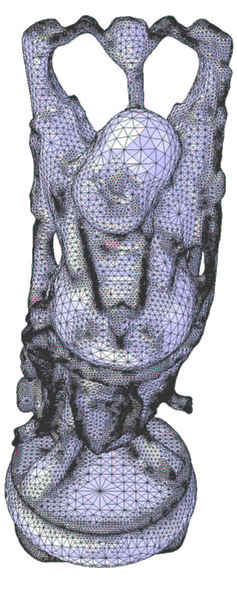
Animations of thin shells with non-flat rest angles (with Robert Bridson). The hollow Buddha on the left uses a weak bending model
and collapses similar to a deflated balloon. In the animation on the right, this is compared to a Buddha with stronger bending forces
that retains its shape similar to a water bottle.


-
Animations of cloth (with Robert Bridson and John Anderson).

-
Animations of water (with Doug Enright and Steve Marschner).

Miscellaneous
- Some scuba diving photos...
octopus,
octopus2,
turtle
- I used to be a competitive weightlifter with a personal best squat of 800 pounds, bench press of 555 pounds
and deadlift of 735 pounds, all in the 198 pound weight class...
squatting 775 pounds,
incline dumbbell press with 170 pound dumbbells,
deadlifting 661 pounds,
front,
back,
side,
torso,
arms
- DOB 2/27/78 (contrary to a popular typo)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}