
Rigid Bodies Project
| Scalable Contact |
|
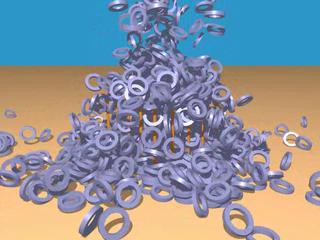
The major problem with current contact algorithms is that they scale very poorly when dealing with stacks of objects. For this project we are investigating different preconditioners for the LCP that arises in most formulations. |
| Realtime Simulation |
|
In order to support realtime simulation, time evolution needs to be stable, thus avoiding spurious energy gain due to approximations in the numerical integration scheme. In the case of rigid bodies we clamp energy during both torque free numerical integration and collisions guaranteeing a stable simulation. |
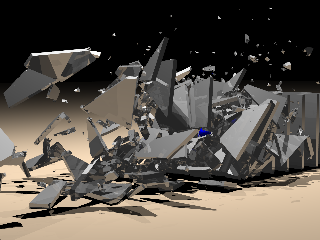
| Scalable Simulation |
|
One of our goals is to support scenes with many rigid bodies composed of highly detailed geometry that is too large to fit into the memory on a single machine. This is often the result of objects fracturing. We are exploring distributed computing solutions, beginning by incorporating MPI into our rigid body engine as well as multithreading locally executed routines. |